Yaskawa Yasnac PC NC User Manual
Page 239
YASNAC PC NC Operating Manual
APPENDIX 3: Parameter Tables
A3 - 13
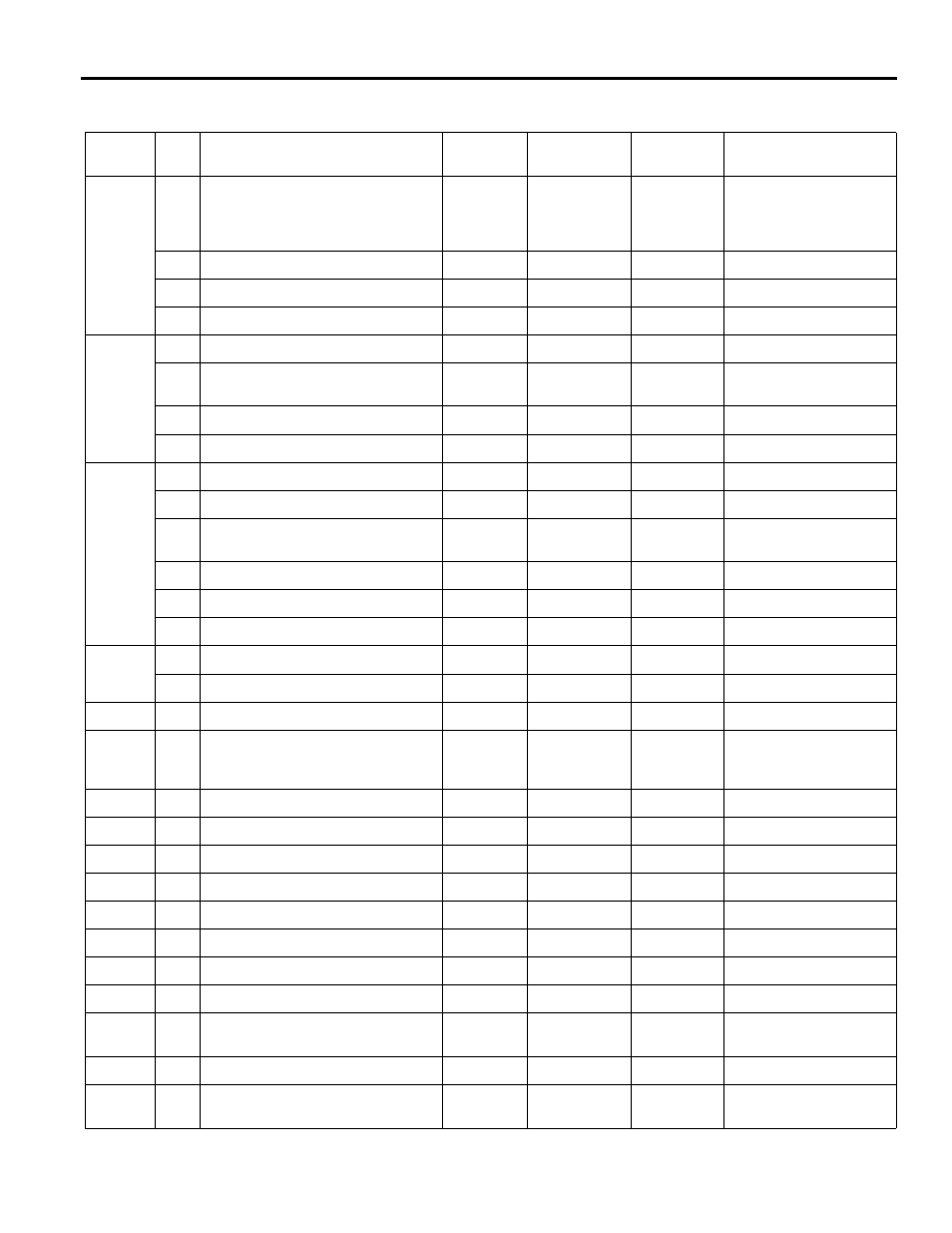
3rd Axis
Address
Bit
Description
Register
Units
Minimum
Value
Maximum
Value
Long Description
1022
0
3rd axis YENET station number
0
15
3rd Physical servo axis
YENET1200 station number
setting (No. 2 to No. 15 sta-
tion)
5
3rd axis debug mode
0
1
6
3rd axis Physical servo axis specifications
0
1
7
3rd axis Physical servo axis enable
0
1
1032
0
3rd axis Velocity loop control method
0
1
1
3rd axis Velocity loop control automatic set-
ting
0
1
6
3rd axis Axis type
0
1
7
3rd axis Servo Motor rotation direction
0
1
1046
0
3rd axis Servo feed amount change
0
1
1
3rd axis Absolute encoder
0
1
2
3rd axis Disregarding error pulse at emer-
gency
0
1
3
3rd axis Follow-up processing for servo OFF
0
1
4
3rd axis Use of absolute encoder
0
1
5
3rd axis Zero return Virtual C phase motor 1
0
1
1046
6
3rd axis Infinite length for rotary axis control
0
1
7
3rd axis Use of 17-bit encoder
0
1
1063
0
Setting of motor selection code for 3rd axis
0
255
1070
2
External torque observer 3rd axis
0
1
Availability of digital ampli-
fier offset external torque
observer
1073
0
3rd axis motor encoder type
0
255
1080
2
3rd axis roundness irregularity compensation
0
1
1083
0
3rd axis Externally installed encoder type
0
255
1096
2
3rd axis Servo Damping control
0
1
1097
2
3rd axis Reduced vibration when servo stop
0
1
1106
3rd Servo axis display name
ascii
0
255
1148
3rd Servo axis automatic system axis name
ascii
0
255
1323
3rd axis Error detect-ON area
0.001mm
0
255
1373
3rd axis Reduced vibration level when servo
stop
%
0
100
1553
3rd axis backlash compensation amount
0.1micron
0
32767
1563
3rd axis No of teeth of monitor when servo
feed change
tooth
0
255