Principle of operation – Delta MMC120 User Manual
Page 9
9
Principle of Operation
Position Measurement
Each Motion Control Module has interface circuitry for multiple magnetostrictive
transducers. Each axis can be configured for a Start/Stop transducer or a Pulse Width
Modulated transducer by changing the axis’s Configuration Word. To make a
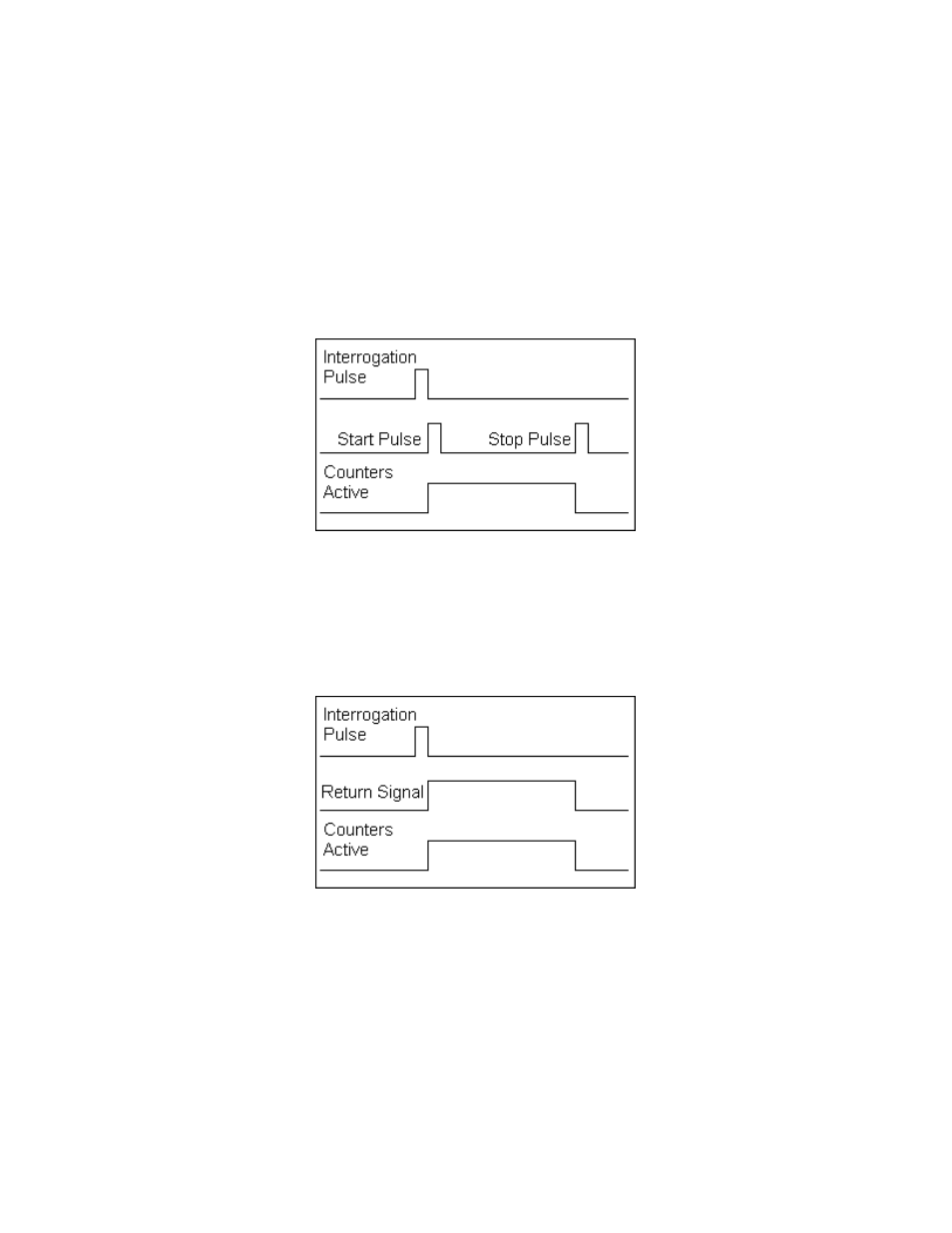
measurement with a Start/Stop transducer, the Motion Controller sends an interrogation
pulse to the transducer. The transducer responds by returning 2 pulses -- a Start pulse
and a Stop pulse. The counters on the Motion Controller are active between the two
pulses. The time between the pulses is proportional to the transducer position.
Start/Stop Pulse Transducer
To make a measurement with a Pulse Width Modulated transducer, the Motion Controller
sends an interrogation pulse to the transducer. The transducer responds with a return
signal that is high while the transducer is determining its position. The counters on the
Motion Controller are active while the return signal is high. The width of the return
signal is proportional to the transducer position.
Pulse Width Modulated Transducer
The Motion Controller converts the Transducer Counts read from the counters to an
ACTUAL POSITION
in user-defined Position Units (usually 0.001 inch) for use by the
Programmable Controller.
Control Loop
This motion controller is a targeting controller; each millisecond the onboard
microprocessor updates the
TARGET POSITION
and
TARGET SPEED
values. For