Decelerating soft stop, Motion direction – Rockwell Automation 2080-LC50 Micro830 and Micro850 Programmable Controllers User Manual User Manual
Page 97
Rockwell Automation Publication 2080-UM002F-EN-E - December 2013
83
Motion Control with PTO and PWM Chapter 7
• The Emergency Stop is configured as Immediate Soft Stop. During
motion, MC_Stop function block is issued with Deceleration parameter
equal to 0.
Decelerating Soft Stop
Decelerating soft stop could be delayed as much as Motion Engine Execution
Time interval. This type of stop is applied in the following scenarios:
• One Hard Limit is enabled for an axis, but Hard Stop on Hard Limit
switch is configured as Off. If the emergency stop is configured as
decelerating stop, during motion, when the Hard Limit switch is detected;
• One Soft Limit is enabled for an axis and the axis has been homed. If the
emergency stop is configured as decelerating stop, during motion, when
the soft limit reach is detected by firmware;
• The Emergency Stop is configured as Decelerating Stop. During motion,
the MC_Stop function block is issued with deceleration parameter set
to 0.
• During motion, MC_Stop function block is issued with Deceleration
parameter not set to 0.
Motion Direction
For distance (position) motion, with the target position defined (absolute or
relative), the direction input is ignored.
For velocity motion, direction input value can be positive (1), current (0) or
negative (-1). For any other value, only the sign (whether positive or negative) is
considered and defines whether the direction is positive or negative. This means
that if the product of velocity and direction is -3, then direction type is negative.
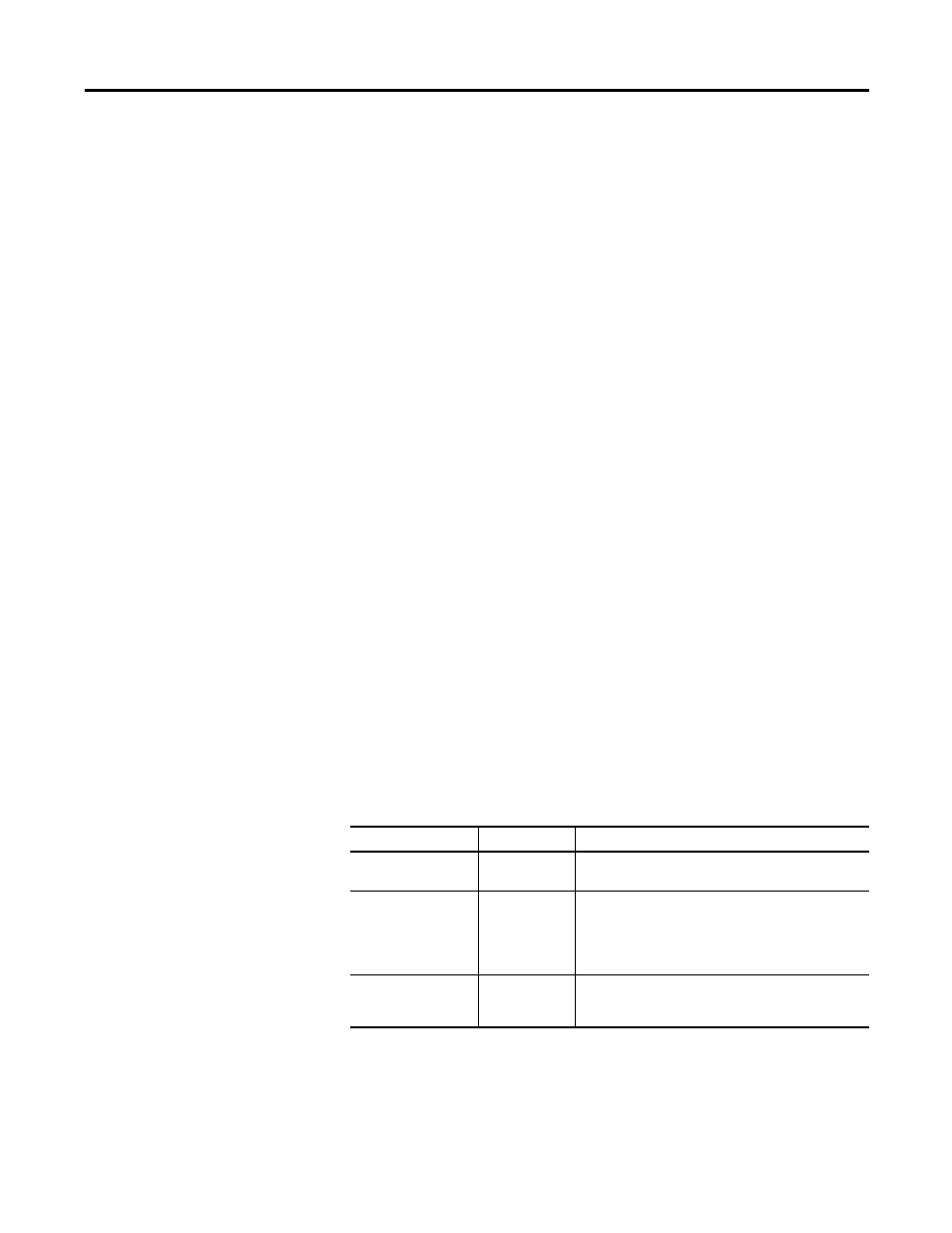
MC_MoveVelocity Supported Direction Types
Direction Type
Value used
(1)
(1)
Data type: short integer.
Direction description
Positive direction
1
Specific for motion/rotation direction.
Also called clockwise direction for rotation motion.
Current direction
0
Current direction instructs the axis to continue its
motion with new input parameters, without direction
change.
The direction type is valid only when the axis is moving
and the MC_MoveVelocity is called.
Negative direction
-1
Specific for motion/rotation direction.
Also referred to as counter-clockwise direction for
rotation motion.