Limits – Rockwell Automation 2080-LC50 Micro830 and Micro850 Programmable Controllers User Manual User Manual
Page 108
94
Rockwell Automation Publication 2080-UM002F-EN-E - December 2013
Chapter 7 Motion Control with PTO and PWM
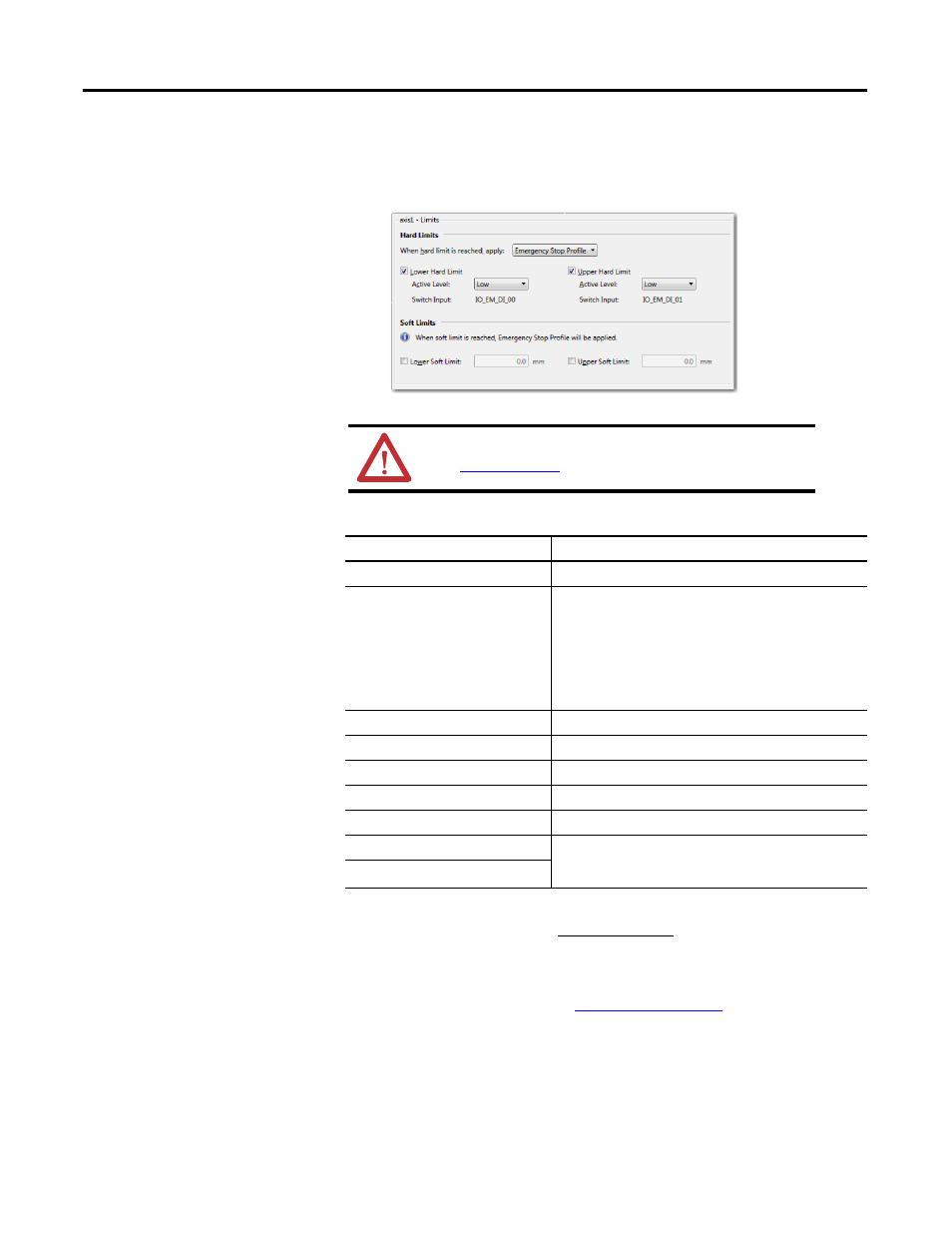
Limits
Edit the Limits parameters based on the table below.
ATTENTION: To learn more about the different types of Limits,
see
Limits Parameters
Parameter
(1)
(1)
To convert from user units to pulse:
Value
Hard Limits
Defines upper and lower hard limits for the axis.
When hard limits is reached, apply
Configure whether to perform a forced PTO hardware stop
(immediately turn off pulse output) or whether to decelerate
(leave pulse output on and use deceleration values as
defined on the Emergency Stop profile).
Set as any of the following:
• Forced PTO Hardware Stop
• Emergency Stop Profile
Lower Hard Limit
Click checkbox to enable a lower hard limit.
Active Level (for Lower Hard Limit)
High or Low.
Upper Hard Limit
Click checkbox to enable.
Active Level (for Upper Hard Limit)
High or Low.
Soft Limits
Defines upper and lower soft limits values.
Lower Soft Limit
(2)
(2)
The parameter is set as REAL (float) value in Connected Components Workbench. To learn more about
conversions and rounding of REAL values, see
Real Data Resolution on page 97
Lower soft limit should be less than upper soft limit.
1. Click checkbox to enable an lower/upper soft limit.
2. Specify a value (in mm).
Upper Soft Limit
(2)
TIP
A red border on an input field indicates that an invalid value has been
entered. Scroll over the field to see tooltip message that will let you
know the valid value range for the parameter. Supply the valid value.
Value in user unit = Value in pulse x
Travel per revolution
Pulse per revolution