Pou pwm_program, The pou defines four variables – Rockwell Automation 2080-LC50 Micro830 and Micro850 Programmable Controllers User Manual User Manual
Page 125
Rockwell Automation Publication 2080-UM002F-EN-E - December 2013
111
Motion Control with PTO and PWM Chapter 7
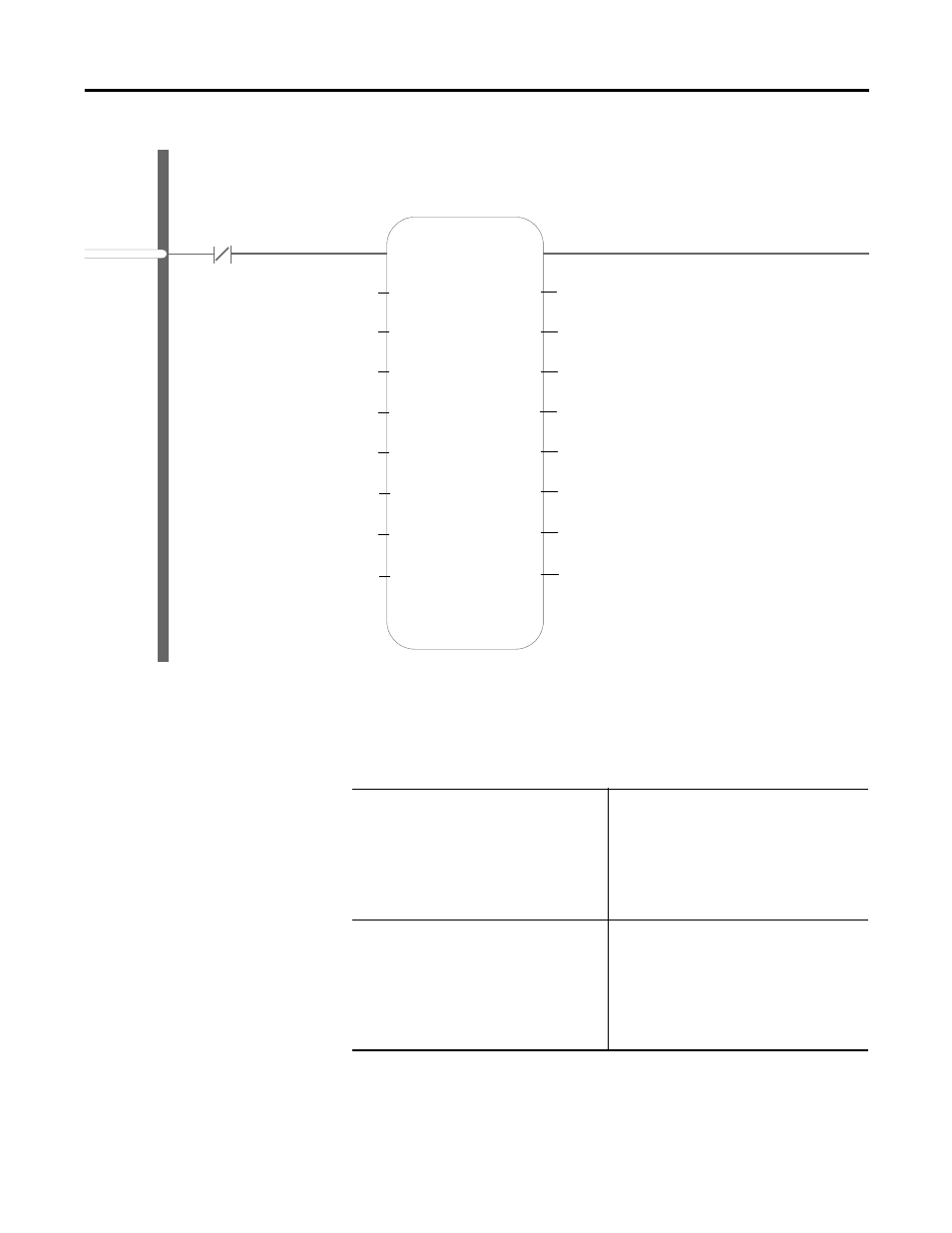
POU PWM_Program
The POU defines four variables.
MC_MoveVelocity_1
MC_MoveVelocity
EN
AxisIn
Velocity
Execute
Acceleration
PWM0
TRUE
G_PWM_Frequency
50000.0
Axis
ENO
InVelocity
Busy
Active
Direction
CommandAborted
3
__SYSVA_FIRST_SCAN
Acceleration
50000.0
Deceleration
0.0
Jerk
1
DirectionIn
0
Error
ErrorID
After first scan, use MC_MoveVelocity to continually set the PWM frequency (for example: 50,000 => 50 KHz) from global variable
G_PWM_Frequency. PWM axis will run forever (until Program Mode, MC_Halt, and so on).
Variable MC_Power_1
(* *)
Direction: VAR
Data Type: MC_Power
Attribute: ReadWrite
Direct variable (Channel):
Variable MC_MoveVelocity_1
(* *)
Direction: VAR
Data Type: MC_MoveVelocity
Attribute: ReadWrite
Direct variable (Channel):
Variable Update_PWM_Duty_Cycle
(* *)
Direction: Var
Data type: BOOL
Attribute: ReadWrite
Direct variable (Channel):
Variable MC_Power_1
(* *)
Direction: VAR
Data Type: MC_Power
Attribute: ReadWrite
Direct variable (Channel):