Example: move to position ignored due to busy – Rockwell Automation 2080-LC50 Micro830 and Micro850 Programmable Controllers User Manual User Manual
Page 87
Rockwell Automation Publication 2080-UM002F-EN-E - December 2013
73
Motion Control with PTO and PWM Chapter 7
Simultaneous Execution of Two Movement Function Blocks
(Busy Output = True)
The general rule is that when a movement function block is busy, then a function
block with the same instance (for example, MC_MoveRelative2) cannot be
executed again until the function block status is not busy.
When a movement function block is busy, a function block with a different
instance
(for example, MC_MoveRelative1 and MC_MoveAbsolute1 on the
same axis) can abort the currently executing function block. This is mostly useful
for on-the-fly adjustments to position, velocity, or to halt after a specific distance.
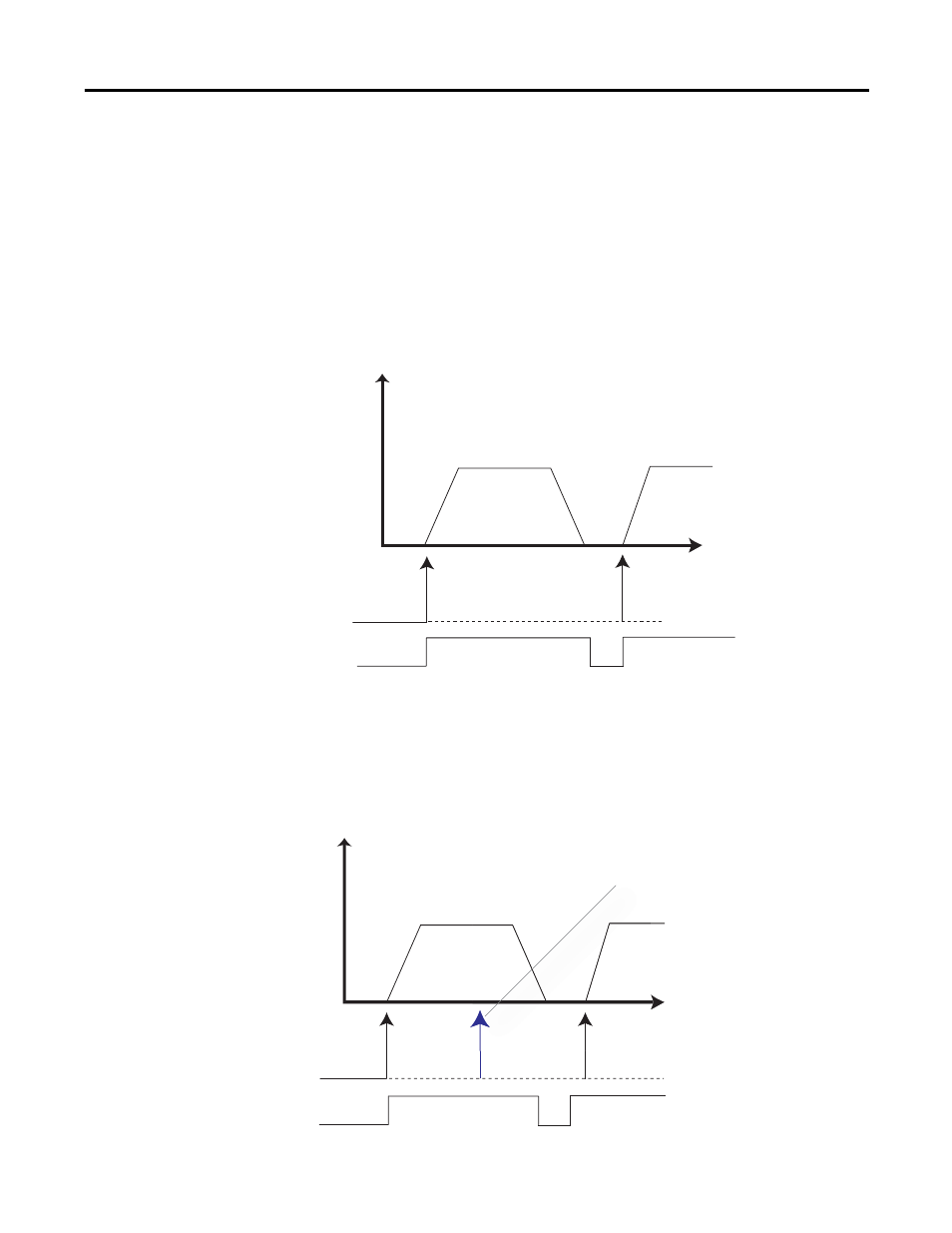
Example: Move to Position Ignored Due to Busy
TIP
MC_MoveRelative, MC_MoveAbsolute will be busy until final position is
reached. MC_MoveVelocity, MC_Halt, and MC_Stop will be busy until
final velocity is reached.
V
elocit
y
Time
Execute1
Busy1
46054
V
elocit
y
Time
Execute1
Busy1
This command is ignored
Simple move position using one
instance of MC_MoveRelative,
MC_MoveAbsolute
For simple moves, the
movement function block
finishes. Busy output indicates
that the function block is
executing and must be allowed
to finish before Execute input is
toggled again.
If Execute is toggled again
before Busy is false, the new
command is ignored. No error is
generated.
46053