Rockwell Automation 2080-LC50 Micro830 and Micro850 Programmable Controllers User Manual User Manual
Page 82
68
Rockwell Automation Publication 2080-UM002F-EN-E - December 2013
Chapter 7 Motion Control with PTO and PWM
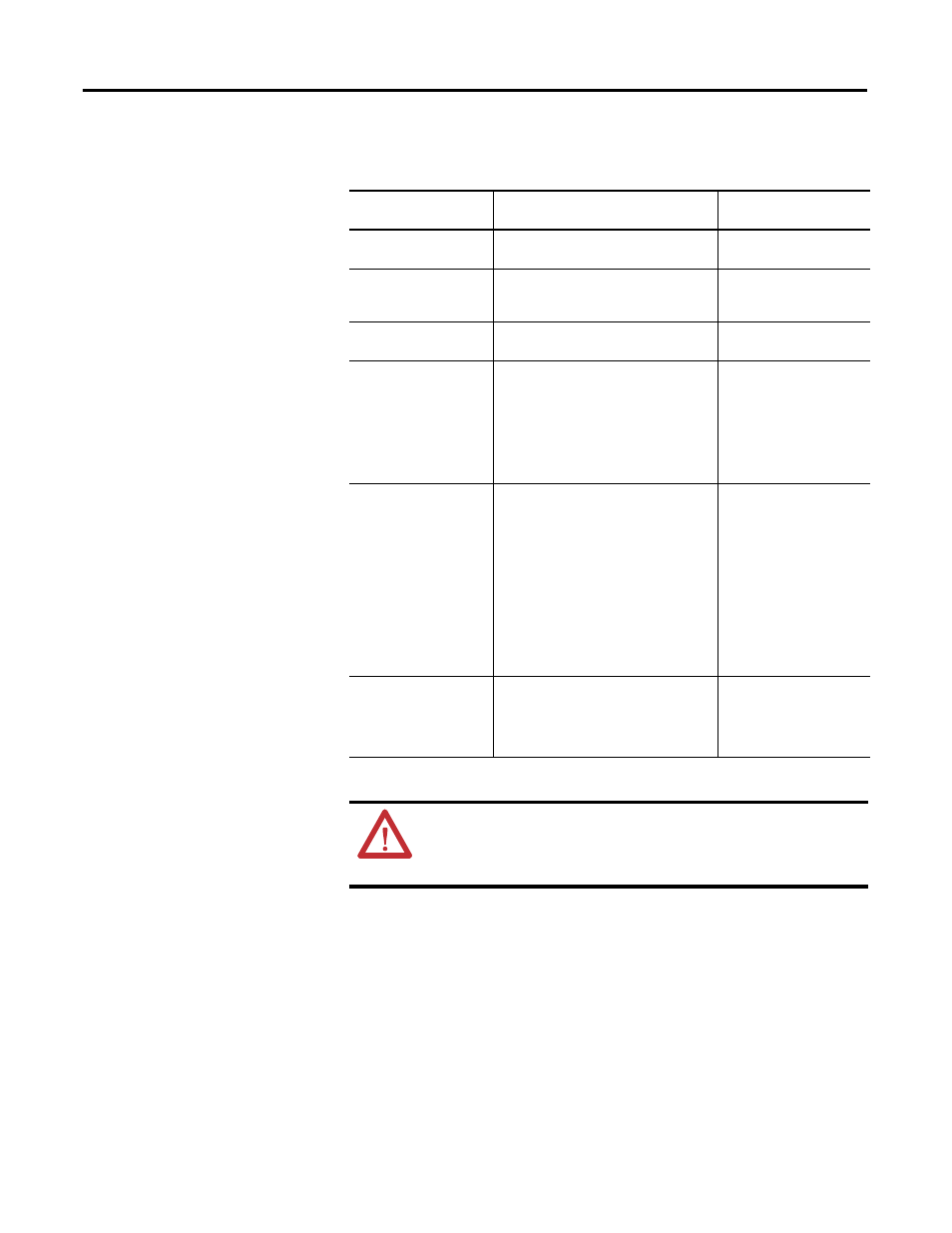
Movement Function Blocks
Function Block Name
Description
Correct Axis State for
issuing Function Block
MC_MoveAbsolute
This function block commands an axis to a
specified absolute position.
Standstill, Discrete Motion,
Continuous Motion
MC_MoveRelative
This function block commands an axis of a
specified distance relative to the actual
position at the time of execution.
Standstill, Discrete Motion,
Continuous Motion
MC_MoveVelocity
This function block commands a never
ending axis move at a specified velocity.
Standstill, Discrete Motion,
Continuous Motion
MC_Home
This function block commands the axis to
perform the "search home" sequence. The
"Position" input is used to set the
absolute position when reference signal
is detected, and configured Home offset
is reached. This function block completes
at "StandStill" if the homing sequence is
successful.
Standstill
MC_Stop
This function block commands an axis
stop and transfers the axis to the state
"Stopping". It aborts any ongoing function
block execution. While the axis is in state
Stopping, no other function block can
perform any motion on the same axis.
After the axis has reached velocity zero,
the Done output is set to TRUE
immediately. The axis remains in the state
"Stopping" as long as Execute is still
TRUE or velocity zero is not yet reached.
As soon as "Done" is SET and "Execute" is
FALSE the axis goes to state "StandStill".
Standstill, Discrete Motion,
Continuous Motion,
Homing
MC_Halt
This function block commands an axis to a
controlled motion stop. The axis is moved
to the state "DiscreteMotion", until the
velocity is zero. With the Done output set,
the state is transferred to "StandStill".
Standstill, Discrete Motion,
Continuous Motion
ATTENTION: Each motion function block has a set of variable inputs and
outputs that allows you to control a specific motion instruction. Refer to
the Connected Components Workbench Online Help for a description of
these variable inputs and outputs.