Rockwell Automation 2080-LC50 Micro830 and Micro850 Programmable Controllers User Manual User Manual
Page 86
72
Rockwell Automation Publication 2080-UM002F-EN-E - December 2013
Chapter 7 Motion Control with PTO and PWM
Output Active
In current implementation, buffered moves are not supported. Consequently, Busy and Active outputs have the same
behavior.
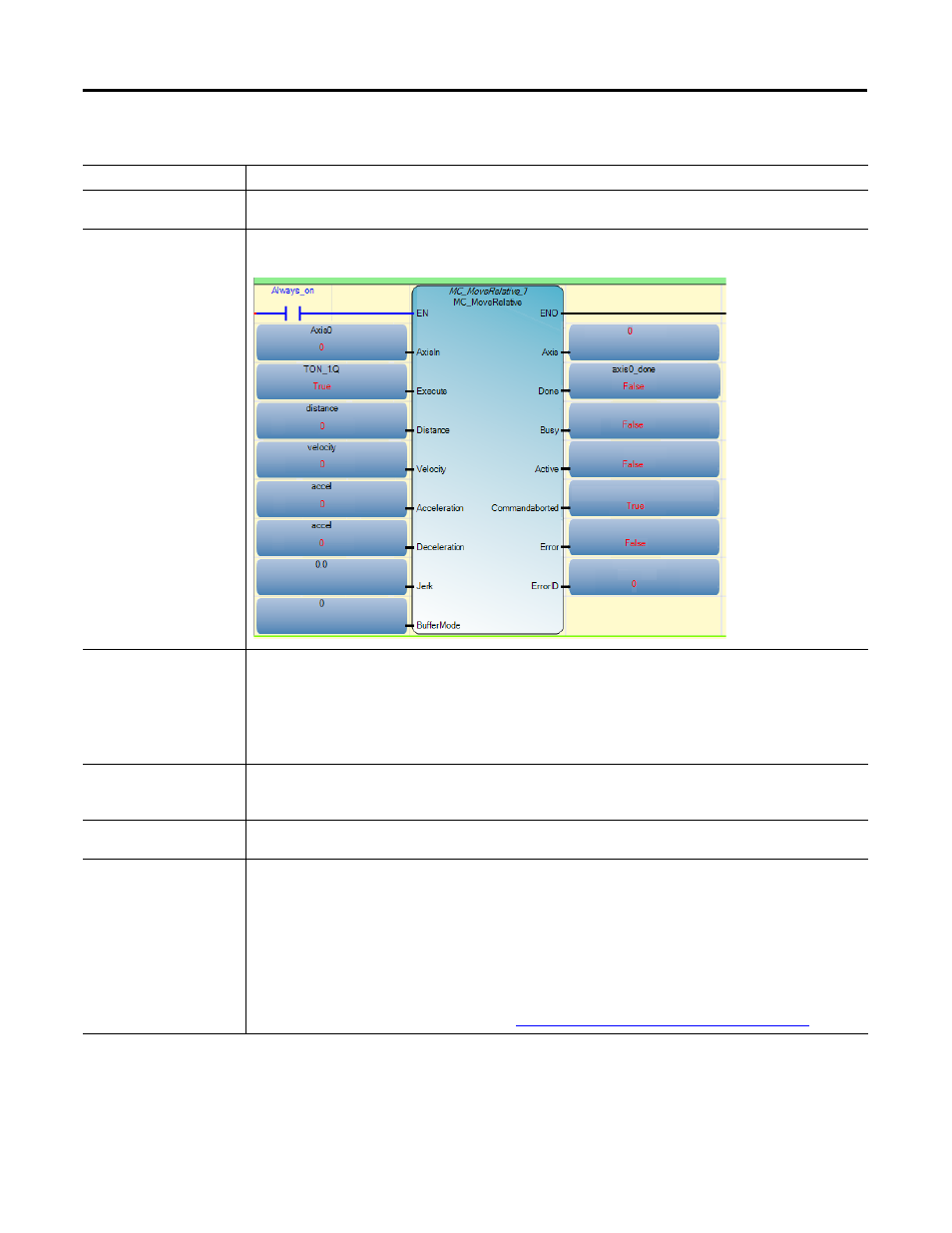
Behavior of
CommandAborted Output
CommandAborted is set when a commanded motion is aborted by another motion command.
When CommandAborted occurs, other output signals such as InVelocity are reset.
Enable and Valid Status
The Enable input for read function blocks is level-sensitive. On every program scan with the Enable input as true, the
function block will perform a read and update its outputs. The Valid output parameter shows that a valid set of outputs is
available.
The Valid output is true as long as valid output values are available and the Enable input is true. The relevant output
values will be refreshed as long as the input Enable is true.
If there is a function block error, and the relevant output values are not valid, then the valid output is set to false. When
the error condition no longer exists, the values will be updated and the Valid output will be set again.
Relative Move versus
Absolute Move
Relative move does not require the axis to be homed. It simply refers to a move in a specified direction and distance.
Absolute move requires that the axis be homed. It is a move to a known position within the coordinate system, regardless
of distance and direction. Position can be negative or positive value.
Buffered Mode
For all motion control function blocks, BufferMode input parameter is ignored. Only aborted moves are supported for this
release.
Error Handling
All blocks have two outputs which deal with errors that can occur during execution. These outputs are defined as follows:
• Error – Rising edge of "Error" informs that an error occurred during the execution of the function block, where the
function block cannot successfully complete.
• ErrorID – Error number.
Types of errors:
• Function block logic (such as parameters out of range, state machine violation attempted)
• hard limits or soft limits reached
• Drive failure (Drive Ready is false)
For more information about function block error, see
Motion Function Block and Axis status Error ID on page 87
.
General Rules for the Motion Function Block
Parameter
General Rules