Rockwell Automation 2080-LC50 Micro830 and Micro850 Programmable Controllers User Manual User Manual
Page 109
Rockwell Automation Publication 2080-UM002F-EN-E - December 2013
95
Motion Control with PTO and PWM Chapter 7
3.
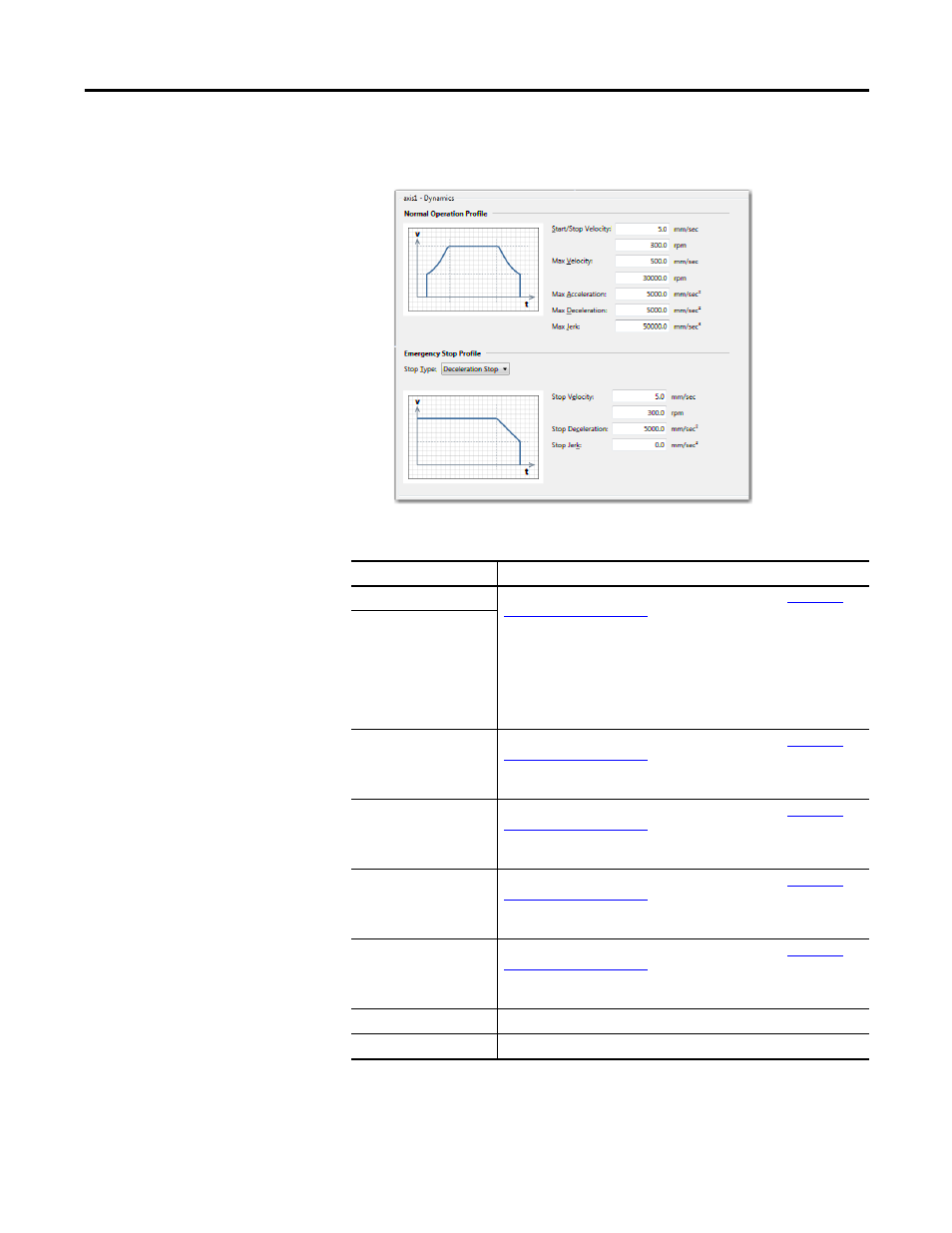
Click Dynamics. The
Dynamics parameters based on the table below.
Dynamics Parameters
Parameter
Values
Start/Stop Velocity
(1)
(2)
The range is based on Motor and Load parameters (See
) using:
Range 1…100,000 pulse/sec
Default: 300 rpm
For example, you can configure the value from 0.005…500 mm/s for
200 pulses per revolution and units of 1 mm per revolution.
(3)
Rpm value is automatically populated when a value in user units is
specified, but the user can also initially enter an rpm value.
Start/stop velocity should not be greater than maximum velocity.
Start/Stop Velocity in
rpm
(1) (2)
Max Velocity
(1) (2)
The range is based on Motor and Load parameters (See
) using:
Range: 1…10,000,000 pulse/sec.
Default: 100,000.0 pulse/sec
Max Acceleration
(1)
The range is based on Motor and Load parameters (See
) using:
Range: 1…10,000,000 pulse/sec
2
Default: 10,000,000 pulse/sec
2
Max Deceleration
(1)
The range is based on Motor and Load parameters (See
) using:
Range: 1…100,000 pulse/sec
2
Default: 10,000,000 pulse/sec
2
Max Jerk
(1)
The range is based on Motor and Load parameters (See
) using:
Range: 0…10,000,000 pulse/sec
3
Default: 10,000,000 pulse/sec
3
Emergency Stop Profile
Defines stop type, velocity, deceleration and jerk values.
Stop Type
Set as Deceleration Stop (default) or Immediate Stop.