Motion axis and parameters – Rockwell Automation 2080-LC50 Micro830 and Micro850 Programmable Controllers User Manual User Manual
Page 91
Rockwell Automation Publication 2080-UM002F-EN-E - December 2013
77
Motion Control with PTO and PWM Chapter 7
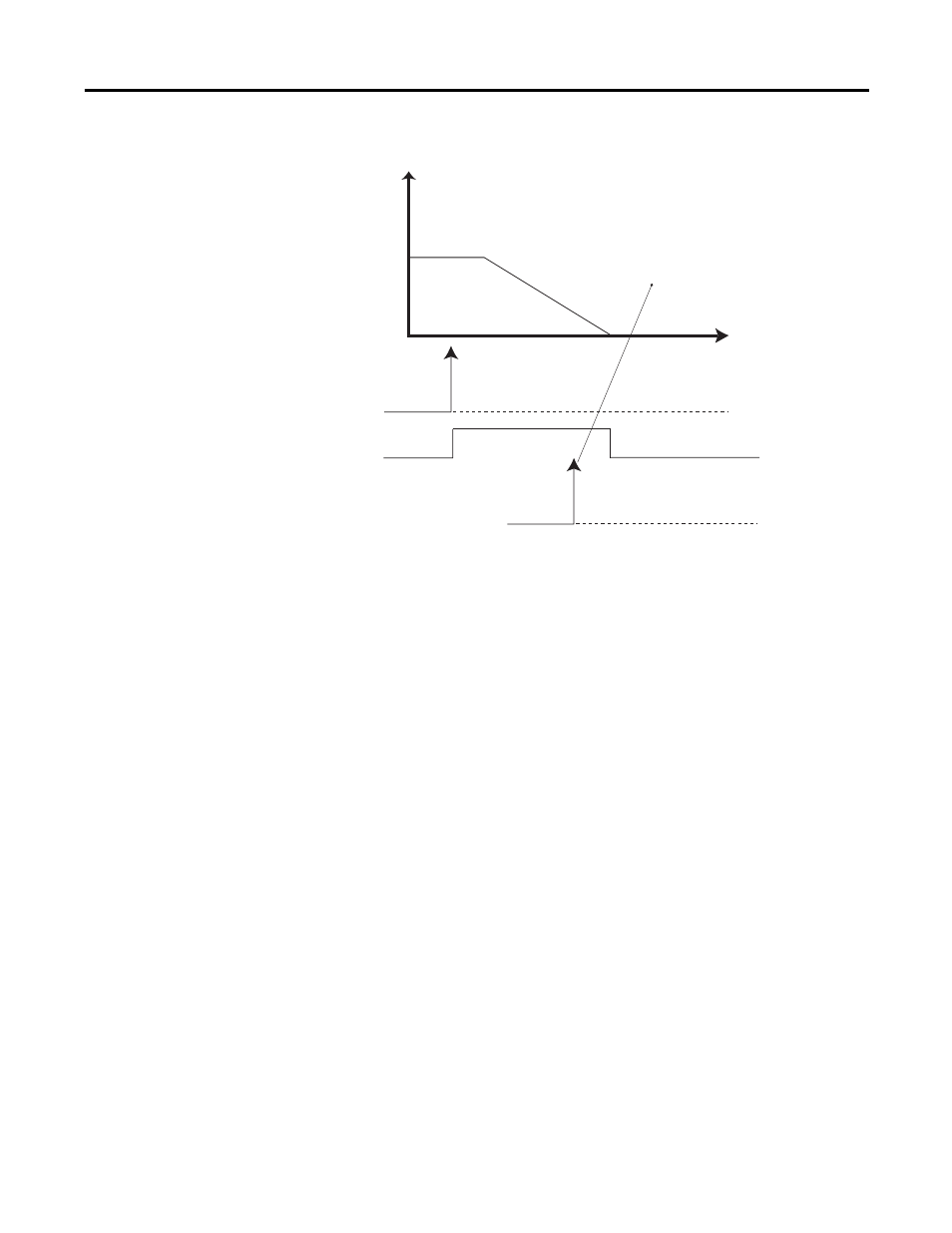
Example: Error Stop using MC_Stop cannot be Aborted
MC_Halt and MC_Stop are both used to bring an axis to a Standstill but
MC_Stop is used when an abnormal situation occurs.
Motion Axis and
Parameters
The following state diagram illustrates the behavior of the axis at a high level
when multiple motion control function blocks are activated. The basic rule is that
motion commands are always taken sequentially, even if the controller has the
capability of real parallel processing. These commands act on the axis’ state
diagram.
The axis is always in one of the defined states (see diagram below). Any motion
command is a transition that changes the state of the axis and, as a consequence,
modifies the way the current motion is computed.
TIP
MC_Stop can abort other motion function blocks but can never be
aborted itself.
TIP
MC_Stop goes to the Stopping state and normal operation cannot
resume.
V
elocit
y
Time
MC_Stop Execute
Busy
Motion function block Execute
This command is ignored.
46049