Rockwell Automation 2080-LC50 Micro830 and Micro850 Programmable Controllers User Manual User Manual
Page 85
Rockwell Automation Publication 2080-UM002F-EN-E - December 2013
71
Motion Control with PTO and PWM Chapter 7
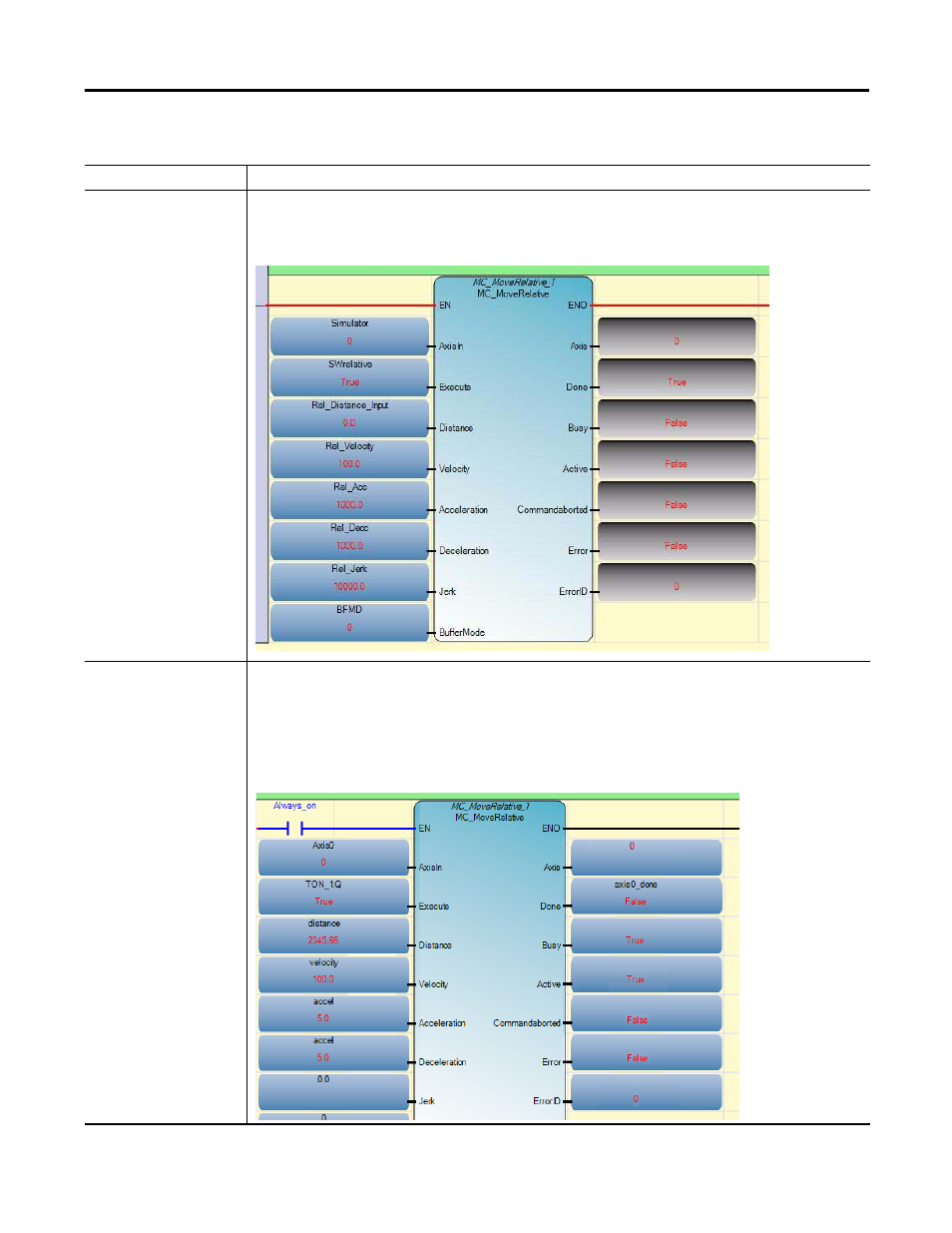
Behavior of Done Output
The output Done is set when the commanded action has completed successfully.
With multiple function blocks working on the same axis in a sequence, the following rule applies:
When one movement on an axis is aborted with another movement on the same axis without having reached the final
goal, output Done will not be set on the first function block.
Behavior of Busy Output
Every function block has a Busy output, indicating that the function block is not yet finished (for function blocks with an
Execute input), and new output values are pending (for function blocks with Enable input).
Busy is set at the rising edge of Execute and reset when one of the outputs Done, Aborted, or Error is set, or it is set at the
rising edge of Enable and reset when one of the outputs Valid or Error is set.
It is recommended that the function block continue executing in the program scan for as long as Busy is true, because the
outputs will only be updated when the instruction is executing. For example, in ladder diagram, if the rung becomes false
before the instruction finishes executing, the Busy output will stay true forever eventhough the function block has
finished executing.
General Rules for the Motion Function Block
Parameter
General Rules