Pid application example, Ipid autotuning for first and second order systems – Rockwell Automation 2080-LC50 Micro830 and Micro850 Programmable Controllers User Manual User Manual
Page 260
244
Rockwell Automation Publication 2080-UM002F-EN-E - December 2013
Appendix F IPID Function Block
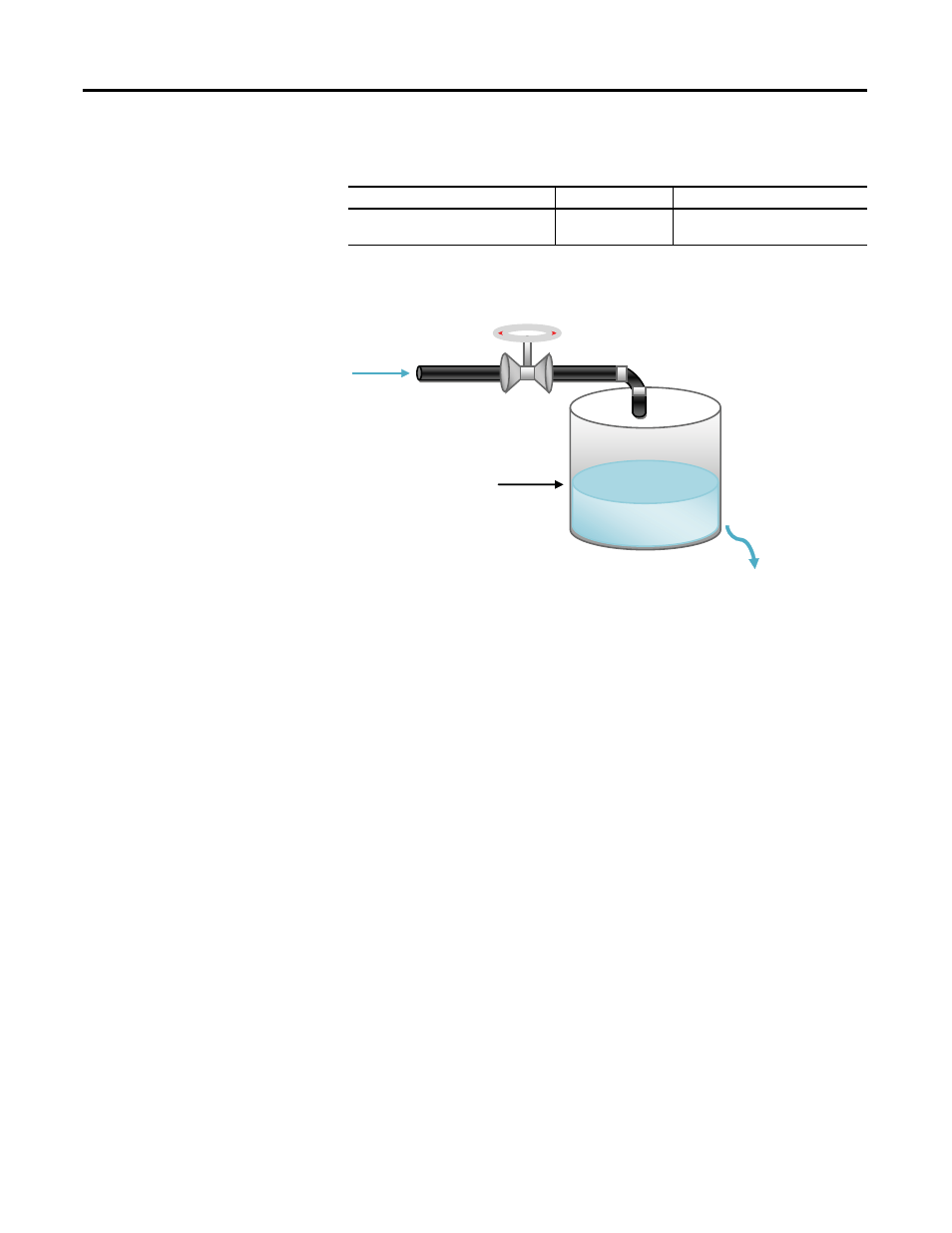
PID Application Example
The illustration above shows a basic water level control system, to maintain a
preset water level in the tank. A solenoid valve is used to control incoming water,
filling the tank at a preset rate. Similarly, outflowing water is controlled at a
measureable rate.
IPID Autotuning for First and Second Order Systems
Autotune of IPID can only work on first and second order systems.
A first order system can be described by a single independent energy storage
element. Examples of first order systems are the cooling of a fluid tank, the flow of
fluid from a tank, a motor with constant torque driving a disk flywheel or an
electric RC lead network. The energy storage element for these systems are heat
energy, potential energy, rotational kinetic energy and capacitive storage energy,
respectively.
This may be written in a standard form such as f(t) =
τdy/dt + y(t), where τ is the
system time constant, f is the forcing function and y is the system state variable.
In the cooling of a fluid tank example, it can be modeled by the thermal
capacitance C of the fluid and thermal resistance R of the walls of the tank. The
system time constant will be RC, the forcing function will be the ambient
temperature and the system state variable will be the fluid temperature.
A second order system can be described by two independent energy storage
elements which exchange stored energy. Examples of second order systems are a
Output Sequence 4: 50 -> 70
Sequence Condition
Autotune Result
Action for Autotune Fail
Process value not able to reach First
peak in time
Likely unsuccessful
Increase ATDynamSet
Water In
Water Level
Tank
Water Out