How to autotune – Rockwell Automation 2080-LC50 Micro830 and Micro850 Programmable Controllers User Manual User Manual
Page 257
Rockwell Automation Publication 2080-UM002F-EN-E - December 2013
241
IPID Function Block Appendix F
How to Autotune
Before you autotune, you need to:
• Verify that your system is constant when there is no control. For example,
for temperature control, process value should remain at room temperature
when there is no control output.
• Configure the set point to 0.
• Set Auto Input to False.
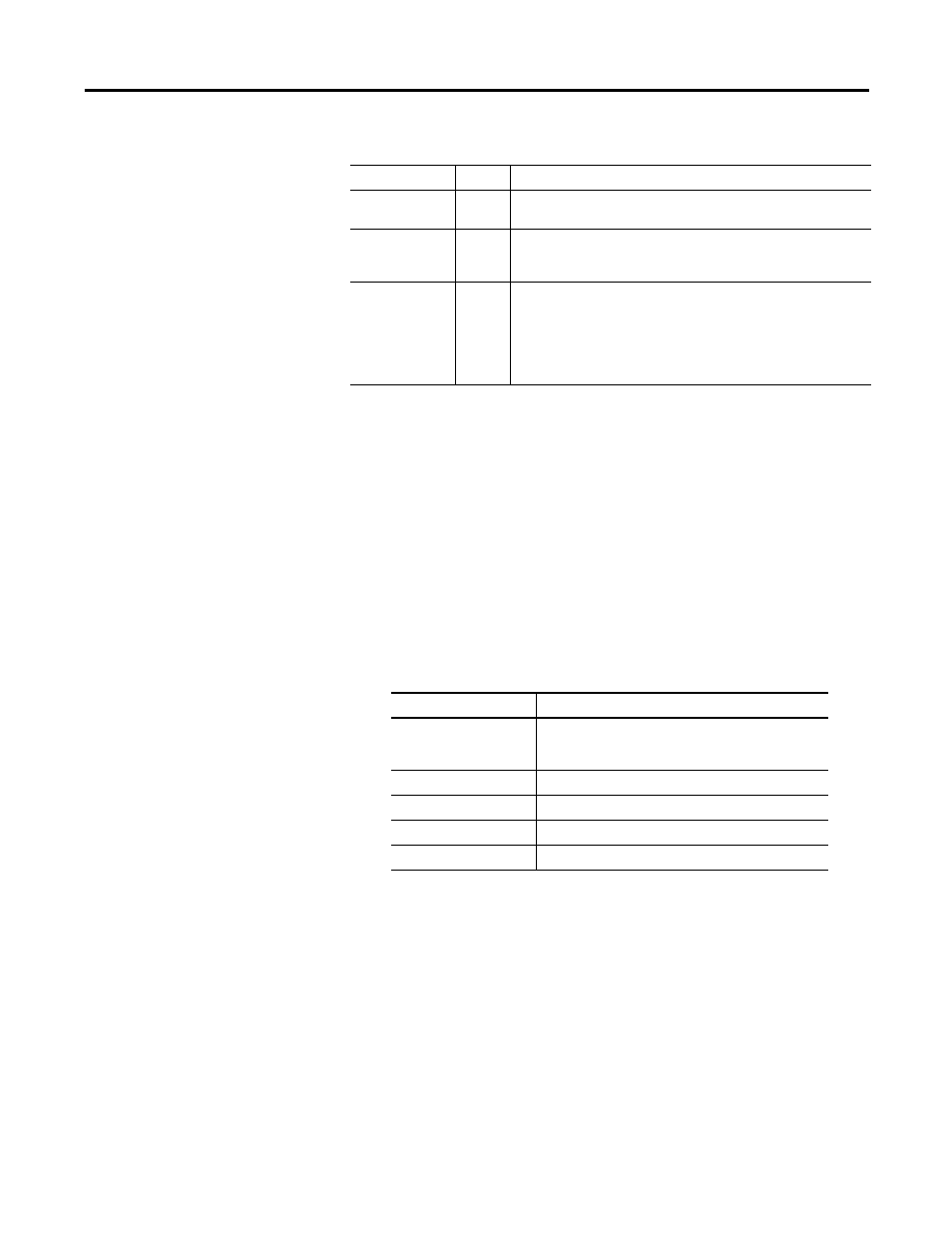
• Set the Gain parameter as follows:
Step
REAL
Step value for AutoTune. Must be greater than noise band and less
than ½ load.
ATDynamSet
REAL
Auto Tune time. Set the time to wait for stabilization after the step
test (in seconds). Auto Tune process will be stopped when
ATDynamSet time expires.
ATReset
BOOL
Determines whether the output value is reset to zero after an
AutoTune sequence:
• True – Reset IPIDCONTROLLER output to zero after Auto tune
process.
• False – leaves output at load value
(1) The application engineer can estimate the value of ATParams.Deviation by observing the value of Proces input.
For example, in a project that involves the control of temperature, if the temperature stabilizes around 22 °C,
and a fluctuation of 21.7…22.5 °C is observed, the value of ATParams.Deviation will be (22.5-21.7)/2=0.4.
AT_Param Data Type
Parameter
Type
Description
GAIN Parameter Values
GAIN Parameter
Value
DirectActing
According to operation:
TRUE (for example, Cooling), or
FALSE (for example, Heating)
DerivativeGain
Typically set to 0.1 or 0.0
ProportionalGain
0.0001
TimeIntegral
0.0001
TimeDerivative
0.0