Homing function block – Rockwell Automation 2080-LC50 Micro830 and Micro850 Programmable Controllers User Manual User Manual
Page 116
102
Rockwell Automation Publication 2080-UM002F-EN-E - December 2013
Chapter 7 Motion Control with PTO and PWM
2.
The Axis Monitor window appears with the following characteristics
available for viewing:
• axis state
• axis homed
• movement
• error description
• command position in user unit
• command velocity in user unit per second
• target position in user unit
• target velocity in user unit per second
Homing Function Block
The homing function block MC_Home commands the axis to perform the
"search home" sequence. The Position input is used to set the absolute position
when the reference signal is detected, and configured home offset is reached. This
function block completes at StandStill if the homing sequence is successful.
MC_Home only can be aborted by the function blocks MC_Stop or MC_Power.
Any abort attempt from other moving function blocks will result in function
block failure with Error ID = MC_FB_ERR_STATE. However, homing
operation is not interrupted, and can be executed as usual.
If MC_Home is aborted before it completes, the previously searched home
position is considered as invalid, and the axis Homed status is cleared.
After axis power on is done, the axis Homed status is reset to 0 (not homed). On
most scenarios, the MC_Home function block needs to be executed to calibrate
the axis position against the axis home configured after MC_Power (On) is done.
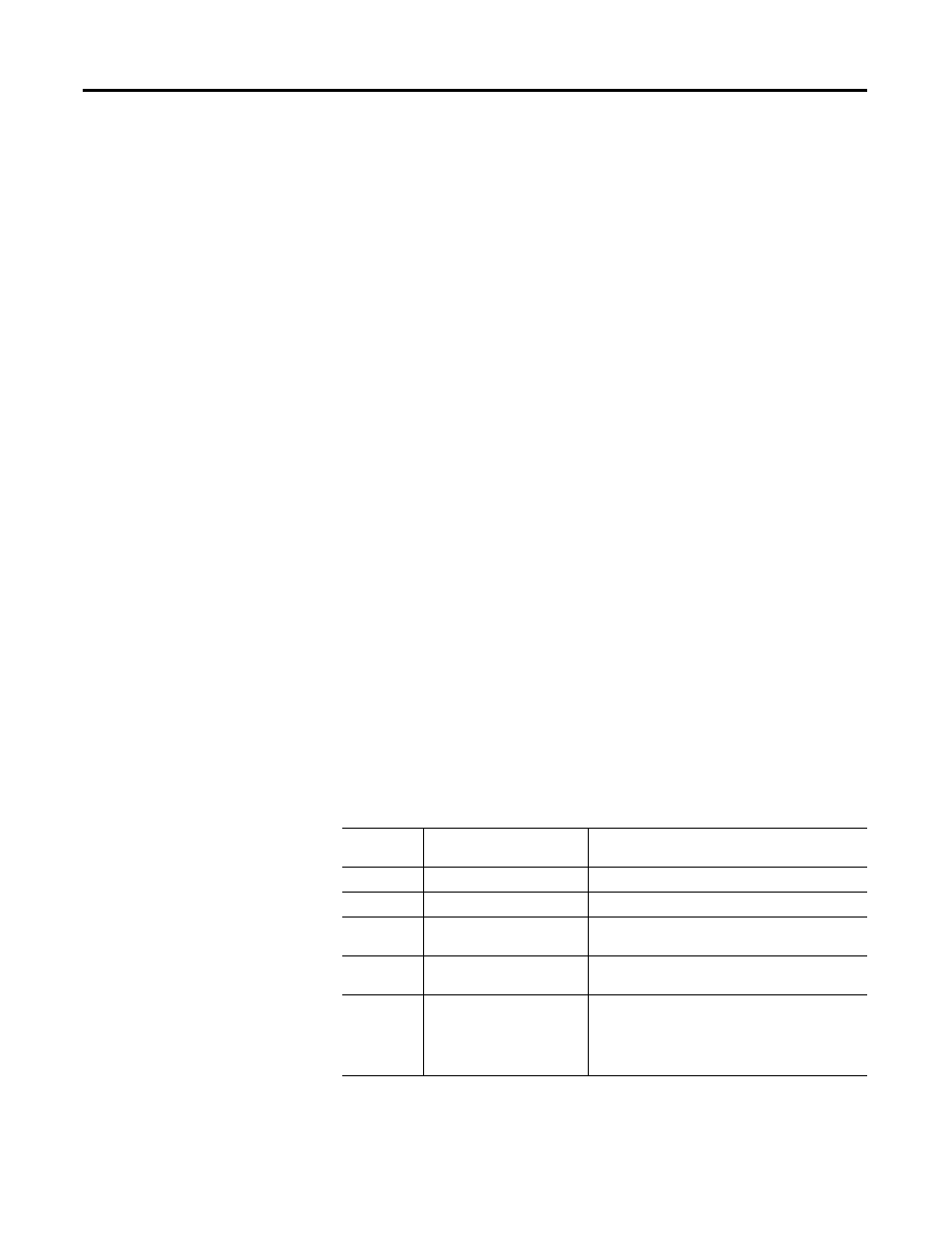
There are five homing modes supported on Micro830 and Micro850 controllers.
Homing Modes
Homing
Mode Value
Homing Mode name
Homing Mode Description
0x00
MC_HOME_ABS_SWITCH
Homing process searches for Home Absolute switch.
0x01
MC_HOME_LIMIT_SWITCH
Homing process searches for limit switch.
0x02
MC_HOME_REF_WITH_ABS
Homing process searches for Home Absolute switch
plus using encoder reference pulse.
0x03
MC_HOME_REF_PULSE
Homing process searches for limit switch plus using
encoder reference pulse.
0x04
MC_HOME_DIRECT
Static homing process with direct forcing a home
position from user reference. The function block will
set current position the mechanism is in as home
position, with its position determined by the input
parameter, "Position".