Rockwell Automation 1757-SWKIT5000 ProcessLogix R500.1 Installation and Upgrade Guide User Manual
Page 252
Publication 1757-IN500A-EN-P - September 2002
11-12 Performance and Capacity Specifications
operator stations and high-level application nodes), controller-level stations,
I/O level chassis, and directly networked devices.
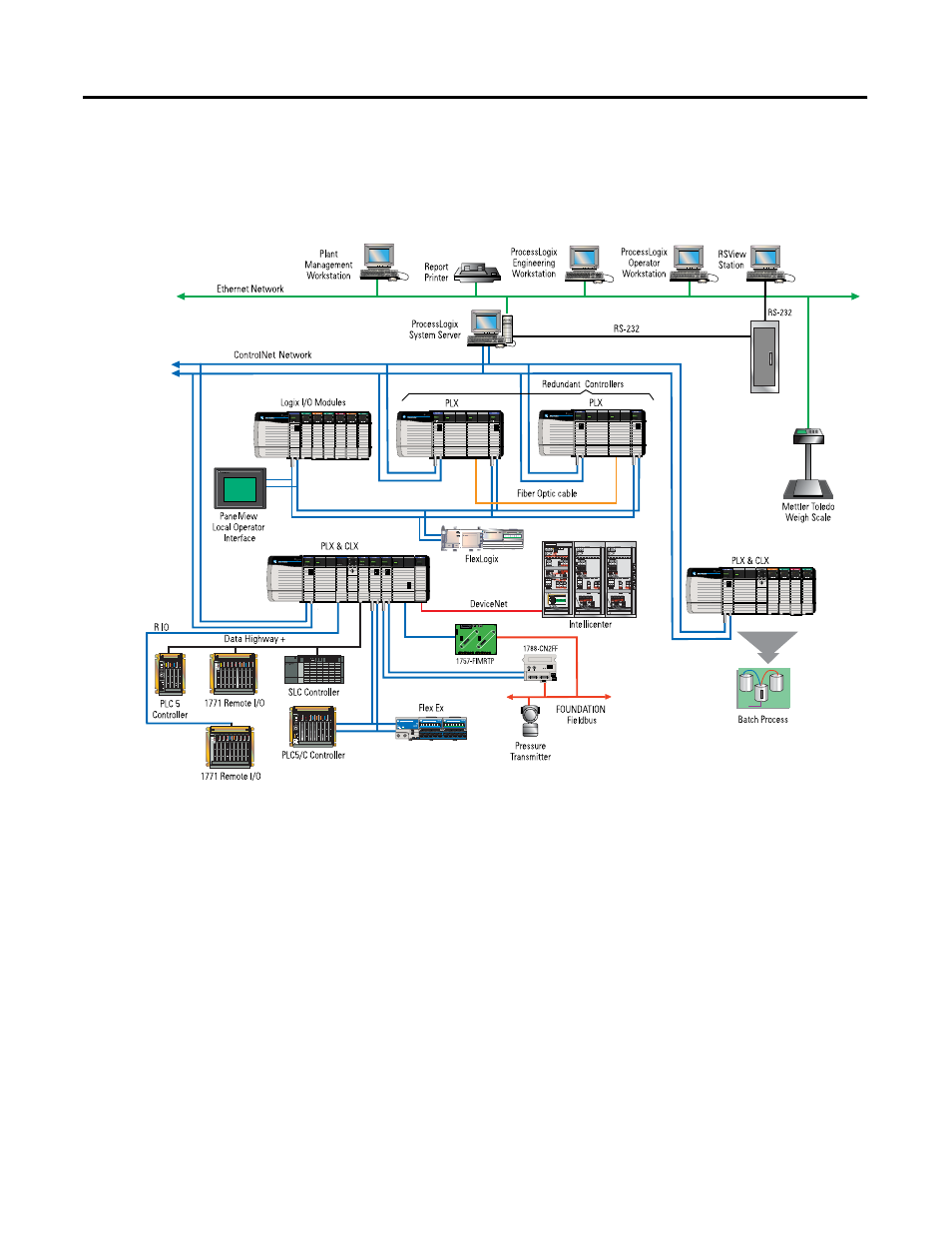
Figure 11.1 System Communications Architecture
The server is the head of a “pyramid” of controllers. Each controller, in turn,
is a head of a pyramid of IO chassis. Each IO chassis is in turn, a head of a
pyramid of field devices nodes.
System communication is most effective and efficient if minimum networks
and nodes are involved between communicating devices within a pyramid. For
example, if a transmitter and a valve form a ¼ second control loop, and they
are on the same H1 network, latency of communications will be minimal and
traffic in other nodes and networks will be minimal.
There are tradeoffs, however. A better algorithm set in the ProcessLogix
controller, the need for sequencing logic, or mixture with conventional or
other bus I/O are examples where controller interaction is required. Further,
interlocks with equipment in other areas of the plant under other ProcessLogix
controllers is not uncommon.
External
DCS
Systems
ABRIO
Operator and
Applications Nodes
Server Node
Controller
Nodes
IO Nodes
Device Nodes