Canopen), 4system structure – Lenze c300 User Manual
Page 29
4
System structure
4.3
Runtime software of the Lenze Controllers
29
Lenze · Controller | Parameter setting & programming · Reference Manual · DMS 1.5 EN · 04/2014 · TD17
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.3.3.3
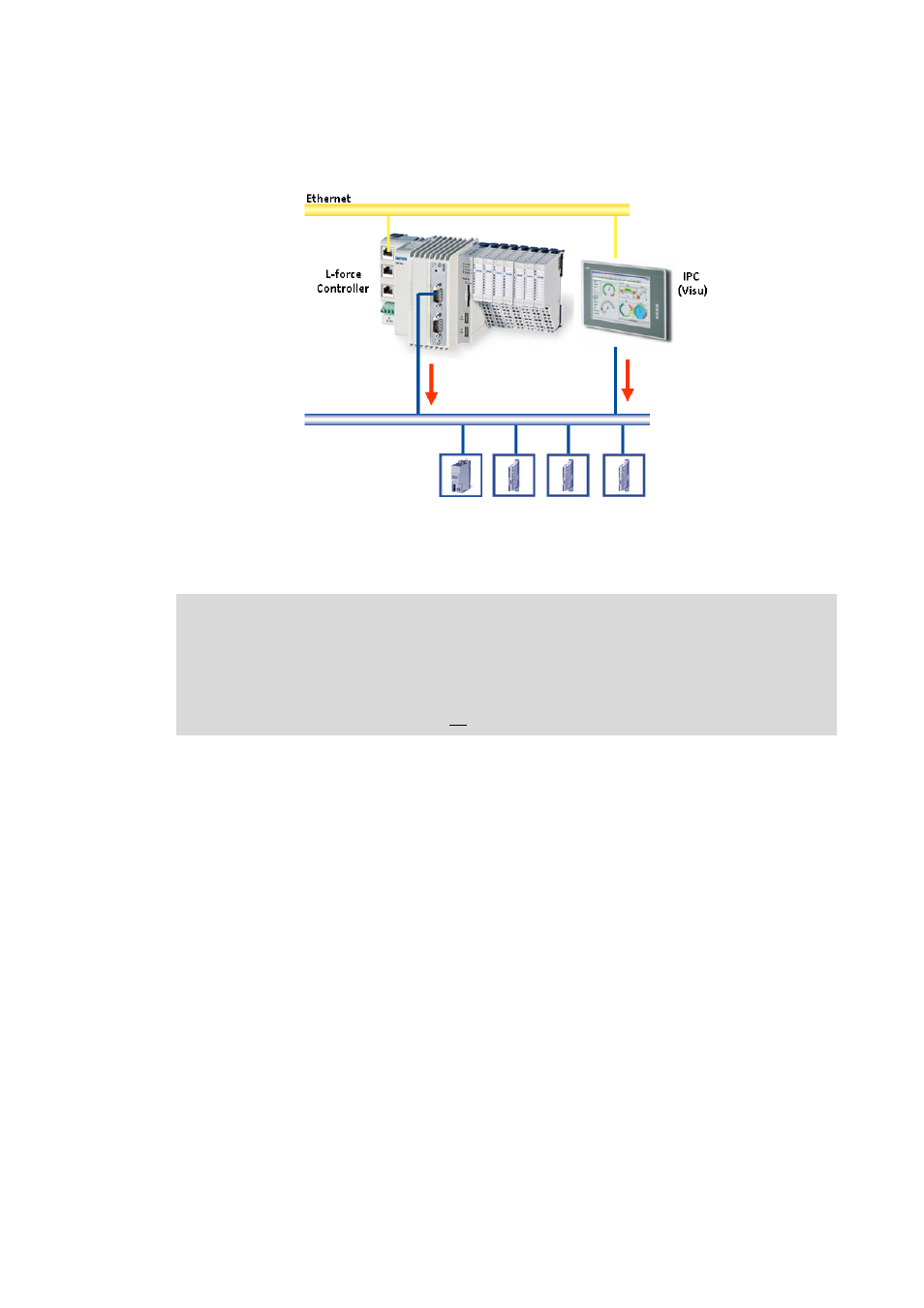
Sample topology 3: Independent control and visualisation (CANopen)
[4-4]
Sample configuration: Parallel access of Controller 3200 C and Visualisation Controller (IPC)
If this topology is used, the Controller 3200 C and the Visualisation Controller (IPC) access the
fieldbus independently of each other.
Advantages
• Spatially separate control and visualisation.
• The visualisation has access to the parameters of the field devices.
Disadvantage
• The visualisation may disrupt the real-time capability of the fieldbus. This topology therefore is
only suitable for Motion systems to a limited extent (depending on the bus system used).
Note!
The configuration with a control and configuration independent of each other is only
available for the CANopen bus system!
• CANopen enables (several) fieldbus master independent of each other.
• In connection with EtherCAT, no configuration with two fieldbus masters is possible.