Parameters a - 32, Reference detection, Fault restart – Yaskawa F7 Drive User Manual User Manual
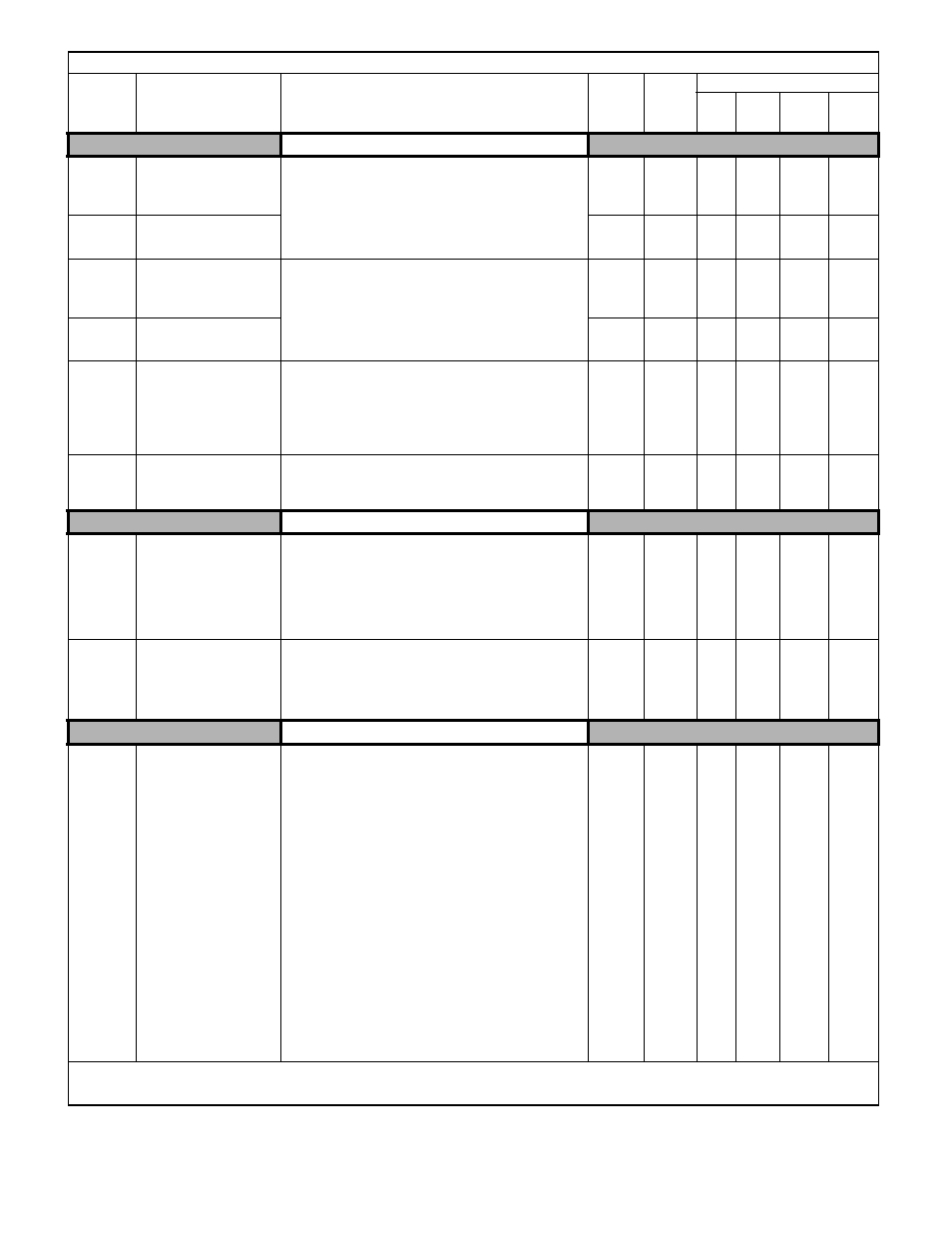
Page 197: Torque detection, Table a.1 f7 parameter list (continued)
Parameters A - 32
Reference Detection
L4-01
Speed Agreement
Detection Level
Spd Agree Level
These parameters configure the multi-function output (H2-
)
settings “Fref/Fout agree 1”, “Fref/Set agree 1”, “Frequency
detection 1,” and “Frequency detection 2". Parameter L4-01 sets the
level while parameter L4-02 sets the hysteresis for the speed detec-
tion output function.
Varies
by
Duty
Rating*
1
0.0Hz
A
A
A
A
L4-02
Speed Agreement
Detection Width
Spd Agree Width
0.0 to
20.0
2.0Hz
A
A
A
A
L4-03
Speed Agreement
Detection Level (+/-)
Spd Agree Lvl +-
These parameters configure the multi-function output (H2-
)
settings “Fref/Fout agree 2”, “Fref/Set agree 2”,
“Frequency detection 3,” or “Frequency detection 4". Parameter
L4-03 sets the level while parameter L4-04 sets the hysteresis for
the speed detection output function.
Varies
by
Duty
Rating*
2
0.0Hz
A
A
A
A
L4-04
Speed Agreement
Detection Width (+/-)
Spd Agree Wdth +-
0.0 to
20.0
2.0Hz
A
A
A
A
L4-05
Frequency Reference Loss
Detection Selection
Ref Loss Sel
Determines how the Drive will react when the frequency reference
is lost. The frequency reference is considered lost when reference
drops 90% or more of its current value in less than 400ms.
0: Stop - Drive will stop.
1: Run at L4-06 PrevRef - Drive will run at the percentage set in
L4-06 of the frequency reference level at the time frequency
reference was lost.
0 to 1
0
A
A
A
A
L4-06
Frequency Reference Level at
Loss Frequency
Fref at Floss
If the frequency reference loss function is enabled (L4-05=1) and
frequency reference is lost, the Drive will run at a reduced
frequency reference determined by the following formula:
Fref = Fref at time of loss
*
L4-06.
0 to 100.0
80.0%
A
A
A
A
Fault Restart
L5-01
Number of Auto Restart
Attempts
Num of Restarts
Sets the counter for the number of times the Drive will perform an
automatic restart on the following faults: GF, LF, OC, OV, PF, PUF,
RH, RR, OL1, OL2, OL3, OL4, UV1. Auto restart will check to see
if the fault has cleared every 5ms. When no fault is present, the
Drive will attempt an auto restart. If the Drive faults after an auto
restart attempt, the counter is incremented. When the Drive
operates without fault for 10 minutes, the counter will reset to the
value set in L5-01.
0 to 10
0
A
A
A
A
L5-02
Auto Restart Operation Selec-
tion
Restart Sel
Determines if the fault contact activates during an automatic restart
attempt.
0: No Fault Relay - fault contact will not activate during an
automatic restart attempt.
1: Fault Relay Active - fault contact will activate during an
automatic restart attempt.
0 to 1
0
A
A
A
A
Torque Detection
L6-01
Torque Detection
Selection 1
Torq Det 1 Sel
Determines the Drive's response to an Overtorque/Undertorque
condition. Overtorque and Undertorque are determined by the
settings in parameters L6-02 and L6-03. The multi-function output
settings “B” and “17” in the H2-
parameter group are also
active if programmed.
0: Disabled
1: OL3 at Speed Agree - Alarm (Overtorque Detection only active
during Speed Agree and Operation continues after detection).
2: OL3 at RUN - Alarm (Overtorque Detection is always active and
operation continues after detection).
3: OL3 at Speed Agree - Fault (Overtorque Detection only active
during Speed Agree and Drive output will shut down on an OL3
fault).
4: OL3 at RUN - Fault (Overtorque Detection is always active and
Drive output will shut down on an OL3 fault).
5: UL3 at Speed Agree - Alarm (Undertorque Detection is only
active during Speed Agree and operation continues after
detection).
6: UL3 at RUN - Alarm (Undertorque Detection is always active
and operation continues after detection).
7: UL3 at Speed Agree - Fault (Undertorque Detection only active
during Speed Agree and Drive output will shut down on an OL3
fault).
8: UL3 at RUN - Fault (Undertorque Detection is always active and
Drive output will shut down on an OL3 fault).
0 to 8
0
A
A
A
A
Denotes that parameter can be changed when the Drive is running.
*1 For Heavy Duty (HD) Rating: Setting Range=0.0 to 300.0. For Normal Duty (ND) Rating: Setting Range=0.0 to 400.0.
*2 For Heavy Duty (HD) Rating: Setting Range= -300.0 to 300.0. For Normal Duty (ND) Rating: Setting Range= -400.0 to 400.0.
Table A.1 F7 Parameter List (Continued)
Parameter
No.
Parameter Name
Digital Operator Display
Description
Setting
Range
Factory
Setting
Control Method
V/F
V/F
w/PG
Open
Loop
Vector
Flux
Vector