Parameters a - 18, Pg option setup, Table a.1 f7 parameter list (continued) – Yaskawa F7 Drive User Manual User Manual
Page 183
Parameters A - 18
E4-08
<3021>
Motor 2 Slip
Compensation Gain
SlpCmp Gain Mtr2
This parameter can help to increase speed precision when working
on a load, although normally adjustment is not necessary.
• When speed is less than that desired value, increase the set value.
• When speed is higher than the desired value, decrease the set
value.
* This parameter functions as gain suppression when in Flux Vector
Control.
0.0 to 2.5
1.0
*1
A
No
A
A
E4-09
<3021>
Motor 2 ASR Proportional (P)
Gain 1
ASR P Gain Mtr2
Sets the proportional gain of the speed loop (ASR).
0.00 to
300.00 *2
20.00 *3
No
A
No
A
E4-10
<3021>
Motor 2 ASR Integral (I)
Time 1
ASR I Time Mtr2
Sets the integral time of the speed loop (ASR) in units of 0.1s.
0.000 to
10.000
0.500
sec *3
N0
A
No
A
E4-11
<3021>
Motor 2 Torque
Compensation Gain
TrqCmp Gain Mtr2
Magnifies the torque compensation gain. Normally this parameter
does not require change, however, adjustments can be made as fol-
lows:
• When the motor cable is long, increase the setting.
• When using a motor with a smaller capacity than the drive (the
largest motor being used), increase this setting.
• If the motor begins to vibrate, adjust the value set so that the
output current does not exceed the drive’s rated output current
when operating at low speeds.
0.00 to
2.50
1.00
A
A
A
No
PG Option Setup
F1-01
PG Parameter
PG Pulses/Rev
Sets the number of pulses per revolution (PPM) of the encoder
(pulse generator).
0 to
60000
1024
-
Q
-
Q
F1-02
Operation Selection at PG
Open Circuit (PGO)
PG Fdbk Loss Sel
Sets stopping method when a PG open circuit fault (PGO) occurs.
See parameter F1-14.
0: Ramp to stop - Decelerate to stop using the active deceleration
time.
1: Coast to stop
2: Fast - Stop - Decelerate to stop using the deceleration time in
C1-09.
3: Alarm Only - Drive continues operation.
0 to 3
1
-
A
-
A
F1-03
Operation Selection at
Overspeed (OS)
PG Overspeed Sel
Sets the stopping method when an overspeed (OS) fault occurs. See
F1-08 and F1-09.
0: Ramp to stop - Decelerate to stop using the active deceleration
time.
1: Coast to stop
2: Fast - Stop - Decelerate to stop using the deceleration time in
C1-09.
3: Alarm Only - Drive continues operation.
0 to 3
1
-
A
-
A
F1-04
Operation Selection at
Deviation
PG Deviation Sel
Sets the stopping method when a speed deviation (DEV) fault
occurs. See F1-10 and F1-11.
0: Ramp to stop - Decelerate to stop using the active deceleration
time.
1: Coast to stop
2: Fast - Stop - Decelerate to stop using the deceleration time in
C1-09.
3: Alarm Only - Drive continues operation.
0 to 3
3
-
A
-
A
F1-05
PG Rotation Selection
PG Rotation Sel
0: Fwd=C.C.W. - Phase A leads with forward run command.
(Phase B leads with reverse run command.)
1: Fwd=C.W. - Phase B leads with forward run command. (Phase
A leads with reverse run command.)
0 to 1
0
-
A
-
A
F1-06
PG Division Rate (PG Pulse
Monitor)
PG Output Ratio
Sets the division ratio for the pulse monitor of the PG-B2 encoder
feedback option board. This function is not available with the
PG-X2 option board.
Division ratio = (1+ n) /m (n=0 to 1, m=1 to 32)
The first digit of the value of F1-06 stands for n, the second and the
third stand for m. (from left to right).
The possible division ratio settings are:
1/32
≤ F1-06 ≤ 1
1 to 132
1
-
A
-
A
Denotes that parameter can be changed when the Drive is running. For Normal Duty (ND) Rating: Setting Range=40.0 to 400.0.
* For Heavy Duty (HD) Rating: Setting Range=40.0 to 300.0.
*1: Default setting changes according to the control mode (E3-01). When E3-01 = 0, E4-08 = 0.0. When E3-01 = 2 or 3, E4-08 = 1.0.
*2: Setting range becomes 1.00 to 300.00 in Flux Vector Control
*3: Default setting changes according to the control mode (E3-01) When E3-01 = 1, E4-09 = 0.20 and E4-10 = 0.200. When E3-01 = 3, E4-09 = 20.00 and E4-10 = 0.500.
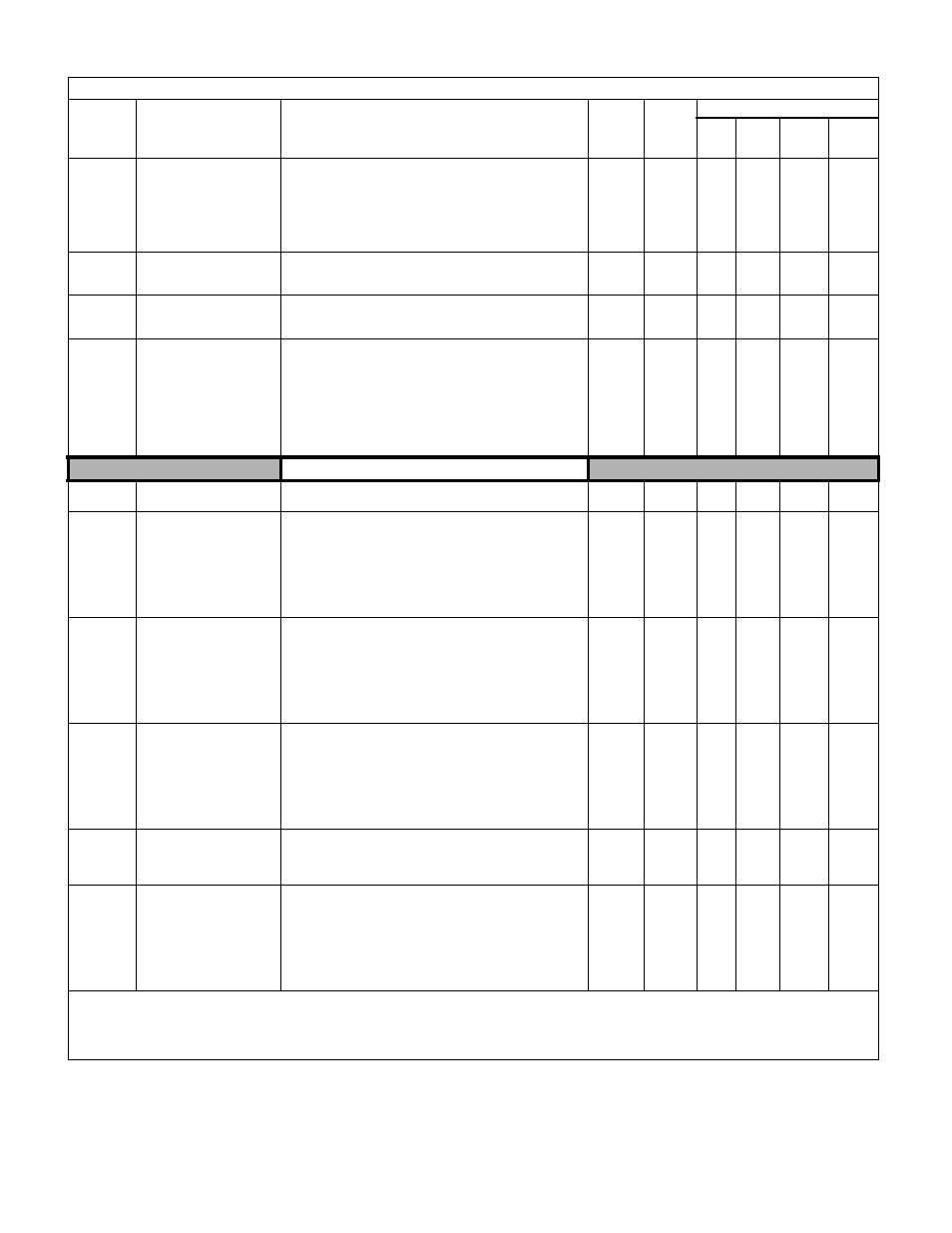
Table A.1 F7 Parameter List (Continued)
Parameter
No.
Parameter Name
Digital Operator Display
Description
Setting
Range
Factory
Setting
Control Method
V/F
V/F
w/PG
Open
Loop
Vector
Flux
Vector