Pit to rud mixing (revolution mixing) – Futaba 18MZ 2.4GHz User Manual
Page 149
149
100%
POS
+0.0%
Linear
Separate
Model 1
Normal
Gr.
+150
+100
+50
+0
-50
-150
-100
RATE
Rate A
INH
ACT
+0.0%
+0.0%
+0.0%
Offset
Rate B
+0.0%
PIT to RUD
25%
0%
0%
0%
75%
Act.POS.
Dump.
Rate
Acceleration
Low
High
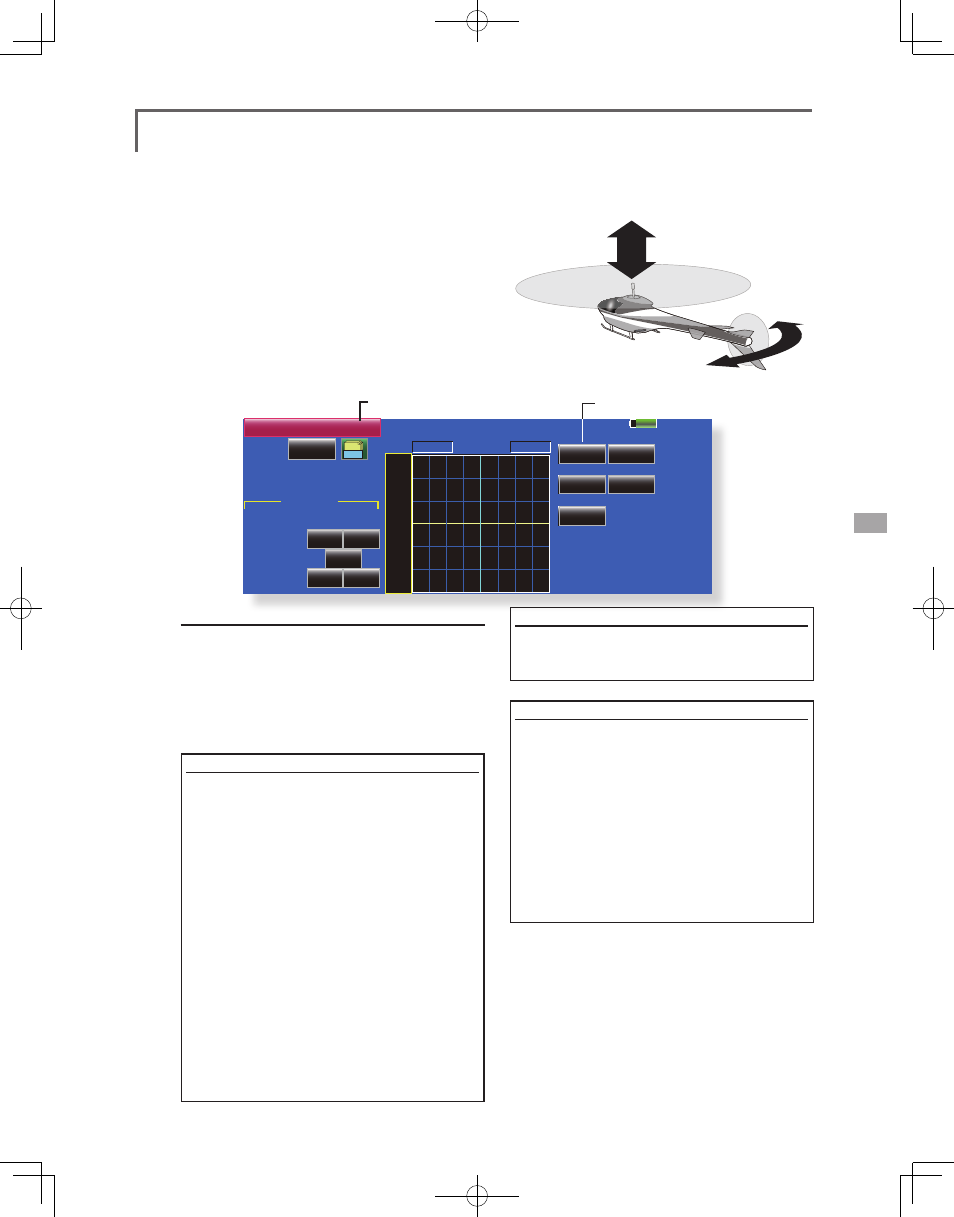
PIT to RUD Mixing (Revolution Mixing)
Use this mixing when you want to suppress the
reaction torque generated by main rotor pitch and
speed changes at pitch operation. Adjust so that the
nose does not move in the rudder direction.
An acceleration function which temporarily
increases the correction rate at throttle stick
acceleration/deceleration operation can be set. The
mixing rate at acceleration/deceleration can be set.
However, when a GY Series or other heading
hold gyro is used, since correction is performed by
● Return to Model Menu
● Touch the [PIT to RUD] button in the Model
Menu to call the setup screen shown below.
Setting method
● When using this function, touch the [INH] button
and display [ON] or [OFF].
● When you want to set the same settings to other
conditions, select the group mode (Gr.). When
you want to add settings to the selected condition
only, select the single mode (Sngl)
● A mixing curve is set.
The mixing curve rate starts from a small
value.
For a rotor with a clockwise operation
direction (polarity), when pitch was
operated at the plus side, set so that mixing
is in the clockwise direction. First, trim at
hovering and then adjust the neutral
position.
1. Adjustment between slow and hovering
Repeatedly hover from take off and land
from hovering at a constant rate matched
to your own rhythm, and adjust the pitch so
the nose does not deflect when the throttle
is raised and lowered.
2. Throttle high side (up to climbing from
hovering and diving hovering)
*Repeat climbing and diving from hovering at a constant
rate matched to your own rhythm and adjust the pitch so
that the nose does not deflect when the throttle is raised
and lowered.
● Normally, use [Line] type.
the gyro, this mixing is not used. If this function is
used when the gyro operation mode is the AVCS
mode, the neutral position will change.
Set the mixing rate so that the rudder direction at
high-speed flight is straight ahead. Adjust for each
condition used.
● An acceleration function can be set. This is
used when the mixture is either too rich or
too lean, which can be caused by sudden
operation of the throttle stick.
● Acceleration rate setting (Rate)
● The return time after operation (Dump) can
be set for both settings (Acceleration (High)
and (Deceleration (Low).
● An Operation Point during acceleration and
deceleration can be set independently.
When this point is exceeded, acceleration
operation is performed.