Quadredundancy, Depth processing – ADS Environmental Services IETG FlowHawk QR 775012 A4 User Manual
Page 54
2-18 IETG FlowHawk Manual
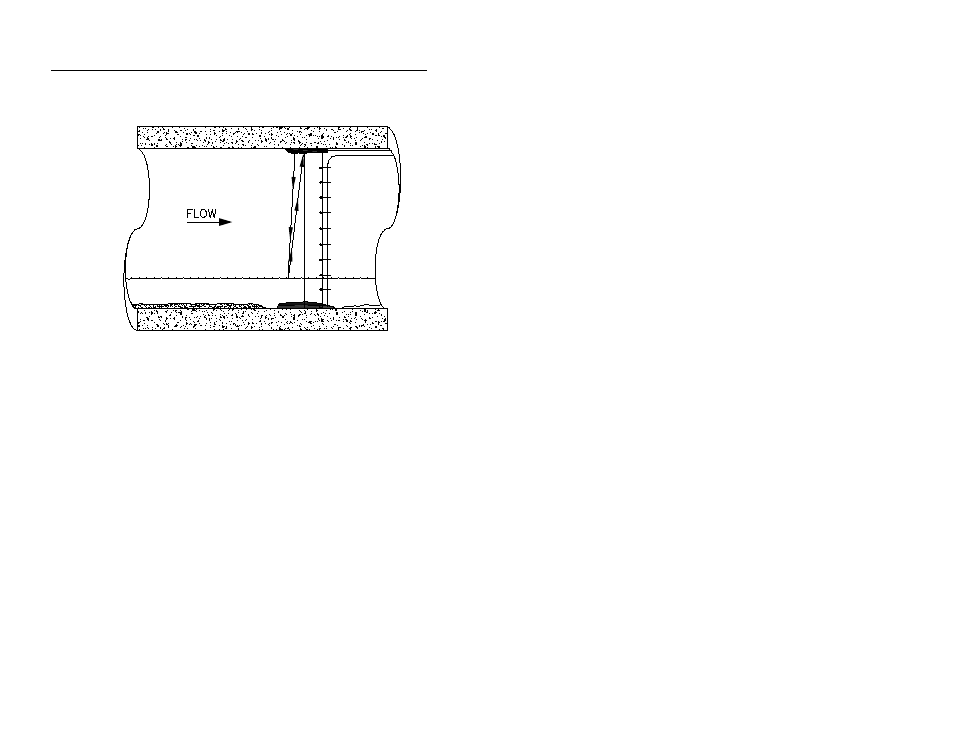
sound in the air using the temperature recorded by a temperature
sensor housed within the ultrasonic depth sensor.
Ultrasonic depth sensor sending signals to flow surface to determine range
Quadredundancy
The sensor contains four ultrasonic transducers for taking readings
to give the sensor quadredundancy, which ensures greater sensor
reading reliability. To take a reading, one transducer transmits a
sound wave while a second transducer listens for the returning echo.
Each transducer has its own electronic circuitry and dedicated
wiring for true redundancy.
Depth Processing
The standard method for processing ultrasonic depth involves firing
the sensor once to take readings for predefined transducer pairs.
The return signals for all sensor pairs are converted to digital data
and referenced in time. When all sensor pairs are added together,
the results indicate that the strongest echoes off the water surface
increase in relative significance while noise and other random return
signals become relatively less significant. Finding the leading edge
of the return echo can be done with high confidence, and travel time
can be converted to a range.