Motor feedback (mf) connector pinout, Ethernet communication connector pinout – Rockwell Automation 2097-Vxxx Kinetix 350 Single-axis EtherNet/IP Servo Drive User Manual User Manual
Page 39
Rockwell Automation Publication 2097-UM002C-EN-P - December 2013
39
Kinetix 350 Drive Connector Data Chapter 3
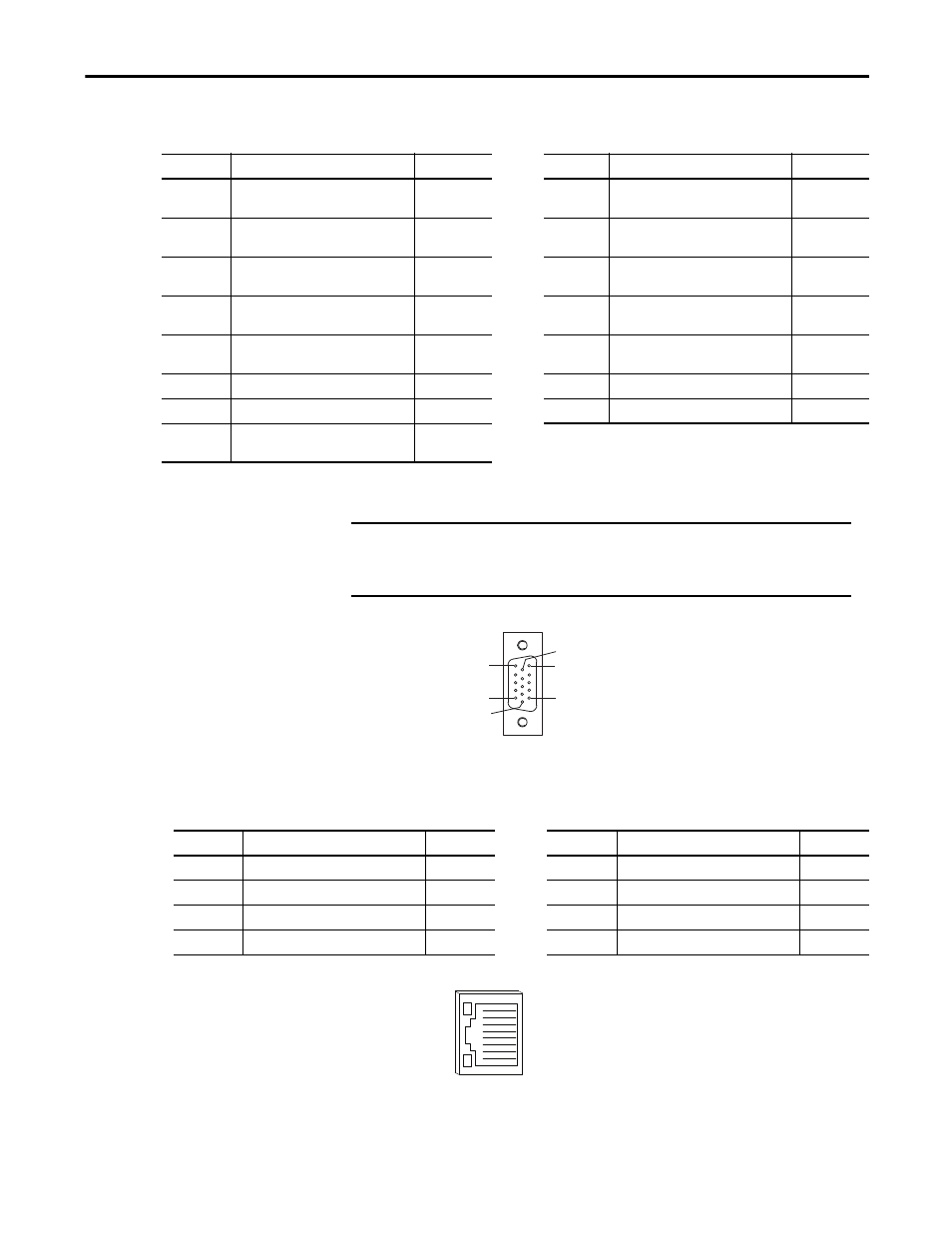
Motor Feedback (MF) Connector Pinout
Figure 13 - Pin Orientation for 15-pin Motor Feedback (MF) Connector
Ethernet Communication Connector Pinout
Figure 14 - Pin Orientation for 8-pin Ethernet Communication (port 1) Port
MF Pin
Description
Signal
MF Pin
Description
Signal
1
Sine differential input+
AM+ differential input+
SIN+
AM+
9
Reserved
—
2
Sine differential input-
AM- differential input-
SIN-
AM-
10
Data differential input -
Index pulse-
DATA-
IM-
3
Cosine differential input+
BM+ differential input+
COS+
BM+
11
Motor thermal switch
(normally closed)
(1)
TS
4
Cosine differential input-
BM- differential input-
COS-
BM-
12
Single-ended 5V Hall effect
commutation
S1
5
Data differential input +
Index pulse+
DATA+
IM+
13
Single-ended 5V Hall effect
commutation
S2
6
Common
ECOM
14
Encoder power (+5V)
EPWR_5V
(2)
7
Encoder power (+9V)
EPWR_9V
(2)
15
Reserved
—
8
Single-ended 5V Hall effect
commutation
S3
(1) Not applicable unless motor has integrated thermal protection.
(2) Encoder power supply uses either 5V or 9V DC based on encoder/motor used.
IMPORTANT
Drive-to-motor power and feedback cable length must not exceed 20 m
(65.6 ft). System performance was tested at these specifications and also
apply when meeting CE requirements.
Pin 11
Pin 6
Pin 15
Pin 1
Pin 10
Pin 5
Port 1 Pin
Description
Signal
Port 1 Pin
Description
Signal
1
Transmit port (+) data terminal
+ TX
5
—
—
2
Transmit port (-) data terminal
- TX
6
Receive port (-) data terminal
- RX
3
Receive port (+) data terminal
+ RX
7
—
—
4
—
—
8
—
—
1
8