Rockwell Automation 2097-Vxxx Kinetix 350 Single-axis EtherNet/IP Servo Drive User Manual User Manual
Page 125
Rockwell Automation Publication 2097-UM002C-EN-P - December 2013
125
Troubleshoot the Kinetix 350 Drive Chapter 7
F 43
(1)
Feedback Signal Loss
One or more A/B channel signals from a feedback device are open, shorted,
missing, or severely attenuated. Specifically, the detected voltage levels of
the signals are below the Feedback Signal Loss Factory Limit. The offending
feedback channel is encoded in the associated Fault/Alarm Sub Code.
Disable/Coast
F 45
Feedback Data Loss
The number of consecutive missed or corrupted serial data packets over the
serial data channel from a feedback device has exceeded the Feedback Data
Loss Factory Limit. The offending feedback channel is encoded in the
associated Fault/Alarm Sub Code. The threshold is set at four misses.
Disable/Coast
F 47
Feedback Device Failure
The feedback device has detected an internal error. Stegmann encoders
return an error code and Tamagawa encoders have an error flag.
Disable/Coast
F 50
Hardware Overtravel Positive
Axis moved beyond the physical travel limits in the positive direction and
activated the Positive Overtravel limit switch.
Decel/Disable
F 51
Hardware Overtravel Negative
Axis moved beyond the physical travel limits in the negative direction and
activated the Negative Overtravel limit switch.
Decel/Disable
F 54
(1)
Excessive Position Error
The Position Error value of the position control loop has exceeded the
configured value for Position Error Tolerance.
Decel/Disable
F 55
(1)
Excessive Velocity Error
The Velocity Error value of the velocity control loop has exceeded the
configured value for Velocity Error Tolerance.
Decel/Disable
F 56
Overtorque Limit
Motor torque has risen above user defined maximum torque level given by
Overtorque Limit.
Decel/Disable
F 57
Undertorque Limit
Motor torque has dropped below user defined minimum torque level given
by Undertorque Limit.
Decel/Disable
F 61
Enable Input Deactivated
Enable has been deactivated while the axis is in Running state.
Decel/Disable
F 62
Controller Initiated Exception
Exception generated specifically by controller.
Disable/Coast
(1) When a TTL encoder loses its A/B signals it is not detected directly. Instead a secondary fault to detect the condition, typically excessive position or velocity error. In this case the motor coasts to a stop, but
is still be enabled in Logix Designer application.
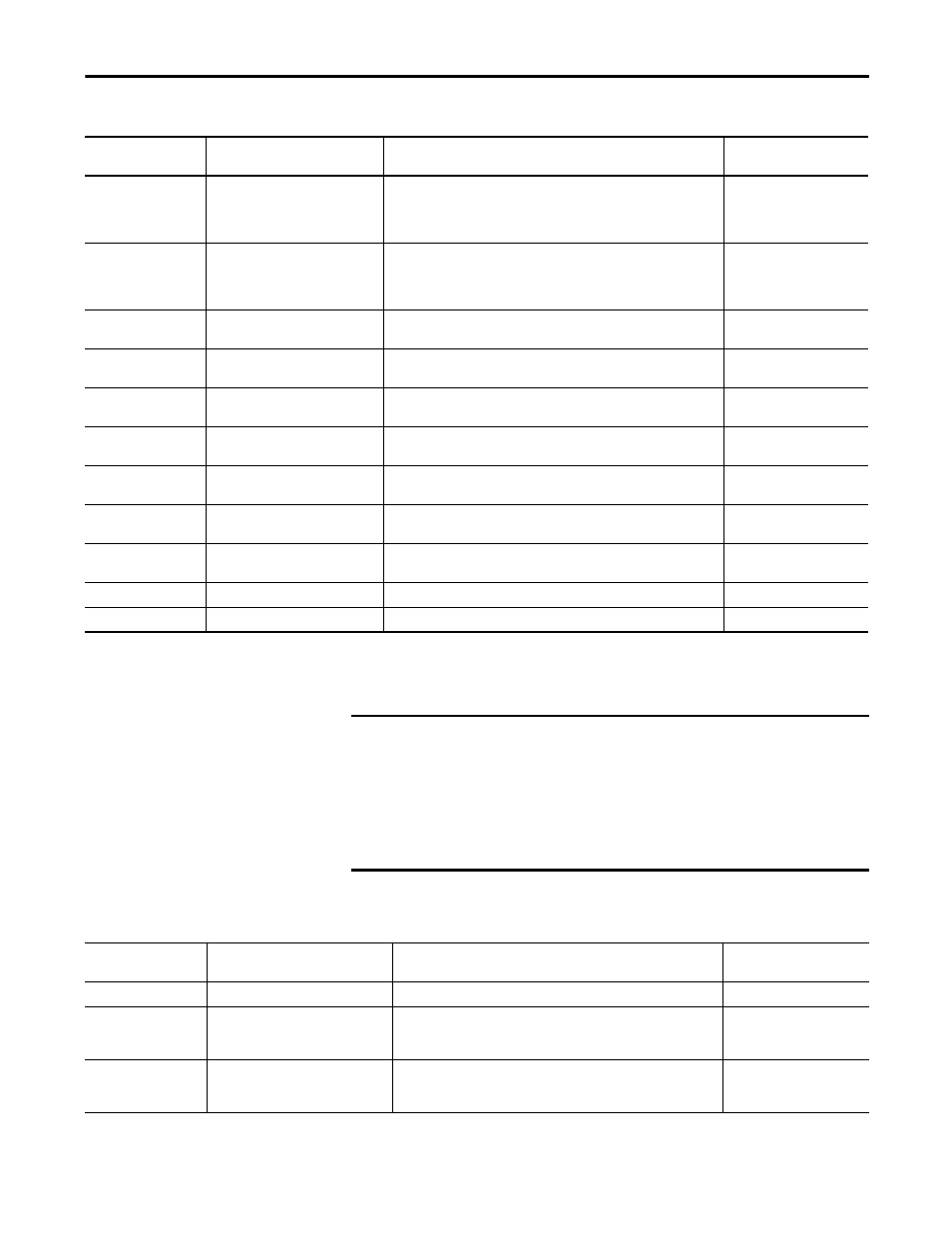
Table 56 - Drive Behavior, F xx Fault Codes (continued)
Four-digit Display
Exception
Description
Best Stopping Method
(only major fault)
IMPORTANT
The fault detection ability of TTL encoders is not as advanced as with Stegmann
hiperface or Tamagawa 17-bit serial encoders. When a TTL encoder loses its A/
B signals, the Kinetix 350 drive is unable to detect this directly. Instead it relies
on a secondary fault to detect the condition, typically excessive position or
velocity error. There are some cases, particularly in Torque mode where the
fault isn't detected at all. In this case the motor coasts to a stop, but is still be
enabled in Logix Designer application.
Table 57 - Drive Behavior, Fcxx Custom Fault Codes
Four-digit Display
Exception
Description
Best Stopping Method
(only Major Fault)
Fc02
Motor Voltage Mismatch
The motor voltage is incompatible with the applied drive voltage.
Disable/Coast
Fc05
Feedback Battery Loss
The battery voltage on a battery-backed motor encoder is low enough such
that absolute position is not longer available. This occurs when the battery
is too low and encoder main power has been removed.
Decel/Disable
Fc06
Feedback Battery Low
The battery voltage on a battery-backed motor encoder is below a caution
level. This occurs when the battery is too low, but main power has not yet
been removed.
Decel/Disable