Table 45 – Rockwell Automation 2097-Vxxx Kinetix 350 Single-axis EtherNet/IP Servo Drive User Manual User Manual
Page 116
116
Rockwell Automation Publication 2097-UM002C-EN-P - December 2013
Chapter 7 Troubleshoot the Kinetix 350 Drive
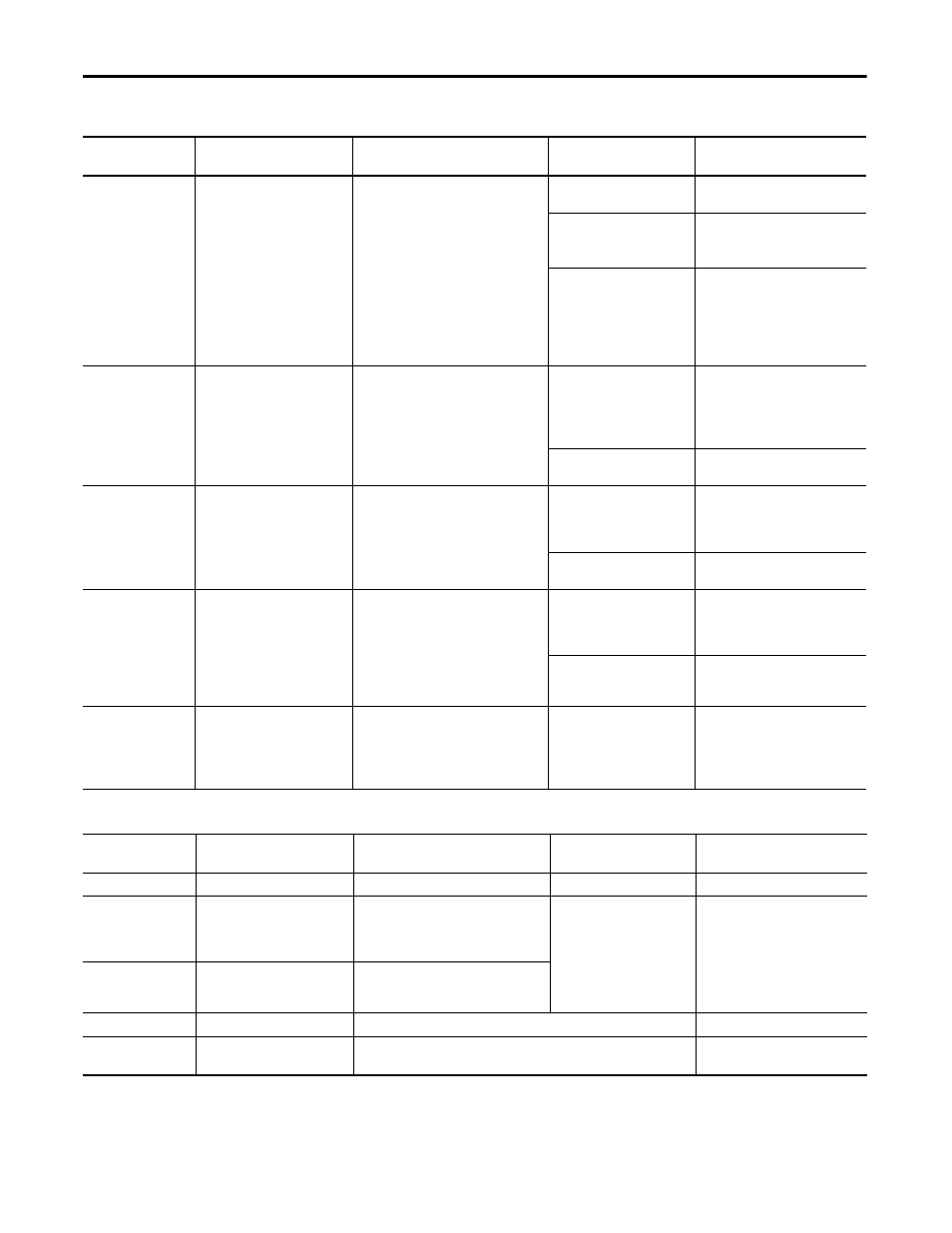
F 55
Excessive Velocity Error
Velocity Error value of the velocity control loop
has exceeded the configured value for Velocity
Error Tolerance.
Partial loss of feedback signals.
Check all wiring at motor feedback (MF)
connector.
Improperly sized drive or motor.
•
Increase velocity error limit or time.
•
Check velocity loop tuning.
•
Verify sizing of system.
Mechanical system out of
specifications.
•
Increase velocity error limit or time.
•
Check velocity loop tuning.
•
Verify mechanical integrity of system
within specification limits.
•
Check motor power wiring.
•
Reduce acceleration.
F 56
Overtorque Limit
Motor torque has exceeded a user-
programmable setting.
•
Overly aggressive motion
profile.
•
Mechanical binding.
•
Verify motion profile.
•
Verify Overtorque settings are
appropriate.
•
Verify sizing of system.
•
Verify torque offset
Mechanical system out of
specifications.
Verify mechanical integrity of system
within specification limits.
F 57
Undertorque Limit
Motor torque has fallen below a user-
programmable setting.
•
Improperly configured limit.
•
Improperly configured motion.
•
Improperly drive/motor sizing.
•
Verify motion profile.
•
Verify Overtorque settings are
appropriate.
•
Verify sizing of system.
Mechanical system out of
specifications.
Verify mechanical integrity of system
within specification limits.
F 61
Drive Enable Input
The hardware enable input was deactivated
while the drive was enabled. This is applicable
when only drive enable input is used.
An attempt was made to enable
the axis through software while
the Drive Enable hardware input
was inactive.
•
Check wiring of drive enable input.
•
Check 24V source.
The Drive Enable input transitioned
from active to inactive while the
axis was enabled.
Verify that Drive Enable hardware input is
active whenever the drive is enabled
through software.
F 62
Controller Initiated Exception
The controller has requested the drive to
generate an exception.
User configured software
overtravel.
•
Move axis out of soft overtravel
range.
•
Clear soft overtravel fault.
•
Check soft overtravel configuration.
•
Consult controller documentation.
Table 45 - Fc xx Fault Codes
Four-digit Display
RSLogix 5000
Fault Message
Problem or Symptom
Potential Cause
Possible Resolution
Fc 02
Motor Voltage Mismatch
Motor voltage incompatible with drive voltage.
Wrong motor connected to drive.
Connect appropriate motor to drive.
Fc 05
Motor Encoder Battery Loss
(applies to Bulletin TLY motors with B
feedback)
The battery voltage on a battery-backed motor
encoder is low enough such that a power loss
has caused the absolute position to no longer be
available.
Weak battery or poor battery
connection.
•
Replace battery.
•
Check battery connection.
Fc 06
Motor Encoder Battery Low
(applies to Bulletin TLY motors with B
feedback)
The battery voltage on a battery-backed motor
encoder is low enough such that a power loss
causes the absolute position to be lost.
Fc 14
Excessive Current Feedback Offset
Current in one or more phases has been lost or remains below a preset level.
Replace the drive.
Fc 26
Runtime Drive Error
The drive firmware encountered an unrecoverable runtime error.
•
Cycle control power.
•
Replace drive.
Table 44 - F xx Fault Codes (continued)
Four-digit Display
RSLogix 5000
Fault Message
Problem or Symptom
Potential Cause
Possible Resolution