Safe torque-off connector pinout – Rockwell Automation 2097-Vxxx Kinetix 350 Single-axis EtherNet/IP Servo Drive User Manual User Manual
Page 37
Rockwell Automation Publication 2097-UM002C-EN-P - December 2013
37
Kinetix 350 Drive Connector Data Chapter 3
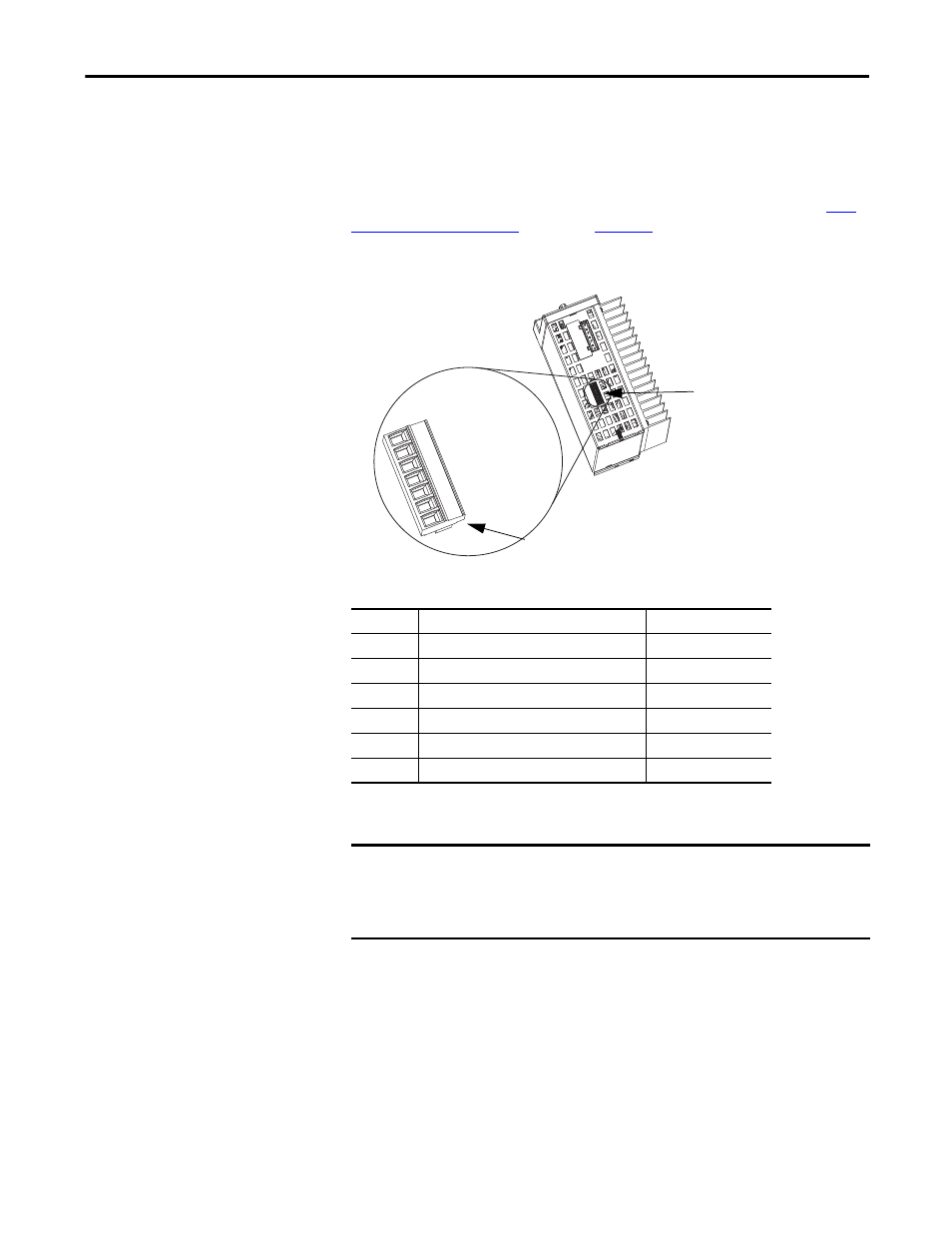
Safe Torque-off Connector Pinout
The Kinetix 350 drive ships with the (6-pin) wiring-plug header that connects
your safety circuit to the Kinetix 350 drive safe torque-off (STO) connector. If
your system does not use the safe torque-off feature, follow instructions in
to wire the drive with motion-
allowed jumpers.
Figure 11 - Safe Torque-off Connector
Table 11 - Kinetix 350 Drive Safe Torque-off Connector Pinout
1 2 3 4 5 6
+24 V DC c
ontrol
Contr
ol COM
Safety
status
Safety
input 1
Safety
COM
Safety
input 2
Bottom view of the Kinetix 350 drive.
(2097-V33PR5-LM drive is shown)
Wiring Plug Header
Safe Torque-off
(STO) Connector
STO Pin
Description
Signal
1
+24V DC output from the drive
+24V DC control
2
+24V DC output common
Control COM
3
Safety status
Safety Status
4
Safety input 1 (+24V DC to enable)
Safety Input 1
5
Safety common
Safety COM
6
Safety input 2 (+24V DC to enable)
Safety Input 2
IMPORTANT
Use only pins STO-1 (+24V DC Control) and STO-2 (Control COM) of the motion-
allowed jumpers to enable the drive when the safe torque-off function is not
used. When the safe torque-off function is in operation, the 24V supply must
come from an external source.