Rockwell Automation 2097-Vxxx Kinetix 350 Single-axis EtherNet/IP Servo Drive User Manual User Manual
Page 126
126
Rockwell Automation Publication 2097-UM002C-EN-P - December 2013
Chapter 7 Troubleshoot the Kinetix 350 Drive
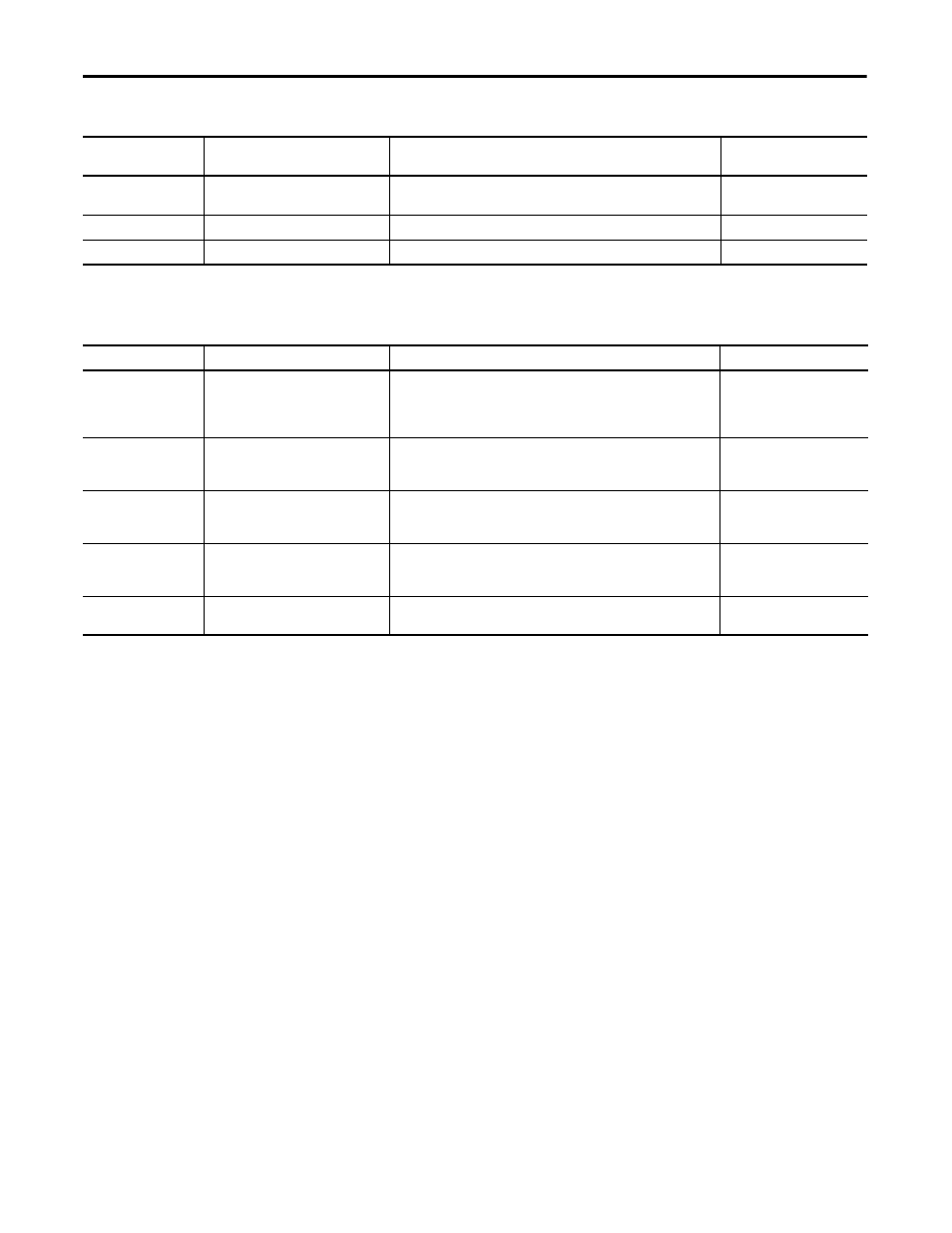
Fc14
Excessive Current Feedback Offset
Current in one or more phases has been lost or remains below a preset
level.
Disable/Coast
Fc26
Runtime Error
Runtime Assertions detected.
Disable/Coast
Fc63
Product Specific
Product Specific (exotic) exceptions by Sub Code.
Disable/Coast
A node fault is a fault that impacts the whole drive.
Table 58 - Drive Behavior, nFxx Node Fault Codes
Four-digit Display
Name
Description
Best Stopping Method
nF01
Control Connection Update Fault
The Control Connection Update Fault code is used to indicate that updates
from the controller over the controller to drive connection have been
excessively late as determined by the Controller Update Delay High Limit
attribute value.
Disable/Coast
nF02
Processor Watchdog Fault
The Processor Watchdog Fault code indicates that the processor associated
with the device node has experienced an excessive overload condition that
has tripped the associated processor watchdog mechanism.
Disable/Coast
nF03
Hardware Fault
The Hardware Fault code indicates that the critical support hardware such
as the FPGA or ASIC associated with the device node has experienced a
fault condition. This occurs when the EPM module has been removed.
Disable/Coast
nF04
Data Format Error
This fault code indicates that an error has occurred in the data format
between the controller and the device, such as a Format Revision
mismatch.
Disable/Coast
nF06
Control Connection Loss Fault
The Control Connection Loss fault code indicates that the Motion controller
to drive connection from the controller has timed out.
Disable/Coast
Table 57 - Drive Behavior, Fcxx Custom Fault Codes
Four-digit Display
Exception
Description
Best Stopping Method
(only Major Fault)