Applications file – Rockwell Automation 20B PowerFlex 700 AC Drives Vector Control (v4.001 and up) User Manual
Page 67
Rockwell Automation Publication 20B-UM002G-EN-P - July 2014
67
Programming and Parameters
Chapter 1
Applications File
Fi
le
Grou
p
No
.
Parameter Name & Description
for symbol descriptions
Values
Re
la
te
d
A
PPLI
CA
TION
S
To
rq
u
e P
ro
vi
n
g
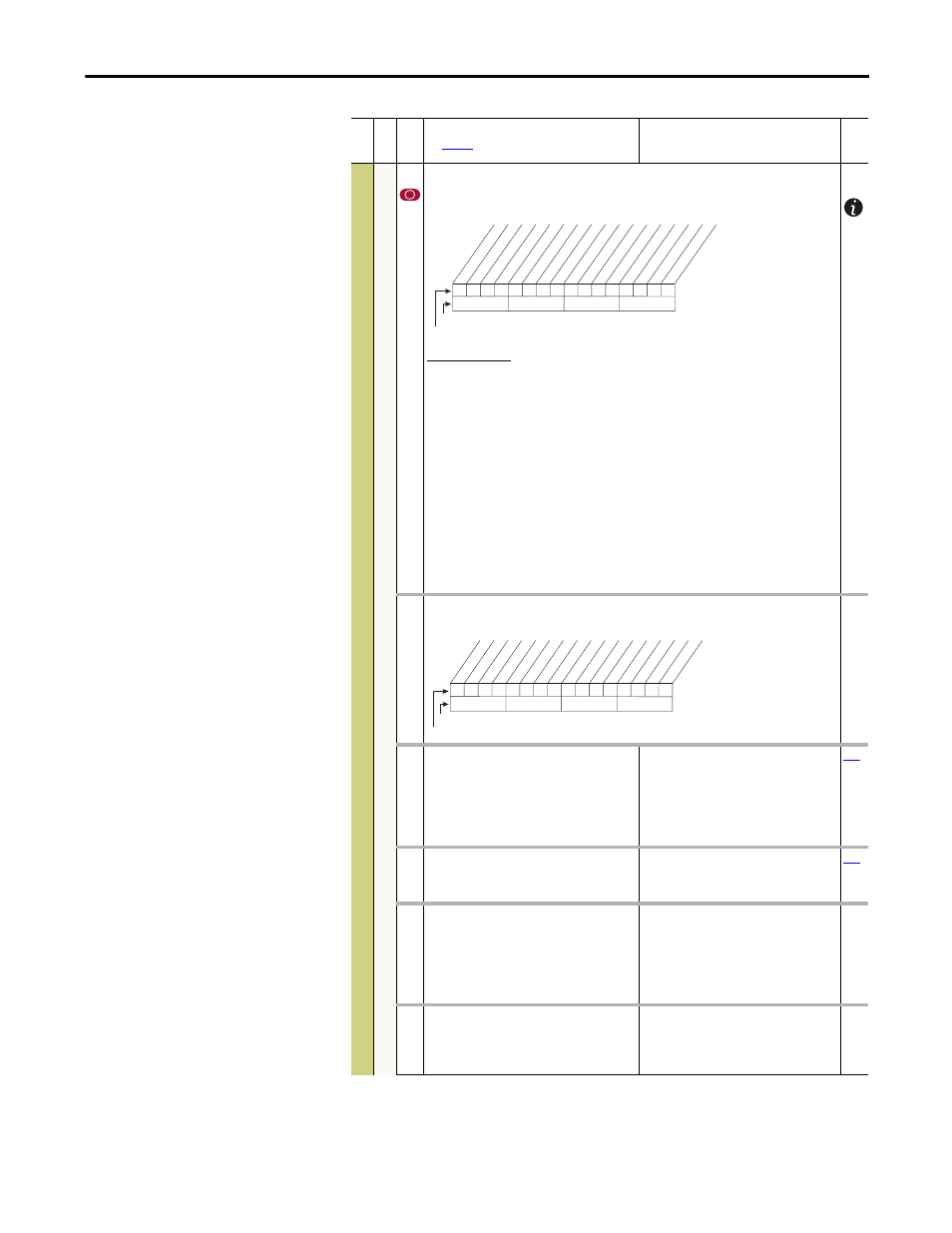
600 [TorqProve Cnfg]
Enables/disables torque/brake proving feature. When “Enabled,” [Digital Out1 Sel] becomes the
brake control. Note: this value is not changed when parameters are reset to factory defaults.
Option Descriptions
Enable
Enables TorqProve features.
Encoderless
Enables encoderless operation – bit 0 must also be enabled.
MicroPosSel
A “1” allows the Micro Position digital input to change the speed command
while the drive is running.
Preload Sel
“0” uses the last torque for preload. “1” uses “TorqRef A” if commanded
direction is forward and “TorqRef B” for reverse.
Load Spd Lim
Enables drive to perform load calculation at base speed. Drive will then limit
operation above base speed depending on load.
NoEnclsBkSlp
A “1” Disables the partial Brake Slip routine from the drive when encoderless
is selected.
StoppedBkSlp
Check for brake slip while stopped.
Test Brake
Before releasing brake, test for slip using [Brake Test Torque].
Fast Stop Bk
Immediately apply brake when a Fast Stop is initiated.
601 [TorqProve Setup]
Allows control of specific torque proving functions through a communication device.
602 [Spd Dev Band]
Defines the allowable difference between the
commanded frequency and encoder feedback
value. A fault will occur when the difference
exceeds this value for a period of time.
Default:
Min/Max:
Units:
2.0 Hz
60.0 RPM
0.1/15.0 Hz
3.0/450.0 RPM
0.1 Hz
0.1 RPM
603 [SpdBand Integrat]
Sets the amount of time before a fault is issued
when [Spd Dev Band] is outside its threshold.
Default:
Min/Max:
Units:
60 mSec
1/200 mSec
1 mSec
604 [Brk Release Time]
Sets the time between the brake release
command and when the drive begins to
accelerate. In Encoderless mode, this parameter
sets the time to release the brake after drive
starts.
Default:
Min/Max:
Units:
0.10 Secs
0.00/10.00 Secs
0.01 Secs
605 [ZeroSpdFloatTime]
Sets the amount of time the drive is below [Float
Tolerance] before the brake is set. Not used in
Encoderless TorqProve mode.
Default:
Min/Max:
Units:
5.0 Secs
0.1/500.0 Secs
0.1 Secs
0
0
0
0
0
0
0
0
0
0
x
x
x
x
x
x
10
0
1
2
3
4
5
6
7
8
9
11
12
13
14
15
1 = Enabled
0 = Disabled
x = Reserved
Bit #
Factory Default Bit Values
Enable
Enc
oderless
Micr
oP
osS
el
Pr
eload S
el
Load Spd Lim
NoEnclsBkSlp
Test Br
ak
e
(1)
Fast St
op Bk
(1)
BkSlp SpdLm
t
(1)
St
oppedBkSlp
(1)
(1)
Firmware 6.002 and later.
0
0
0
0
x
x
x
x
x
x
x
x
x
x
x
x
10
0
1
2
3
4
5
6
7
8
9
11
12
13
14
15
1 = Enabled
0 = Disabled
x = Reserved
Bit #
Factory Default Bit Values
Fast St
op
Micr
o P
os
Dec
el Limit
End St
op