Figure 15 - encoder incremental w/dwell example – Rockwell Automation 20B PowerFlex 700 AC Drives Vector Control (v4.001 and up) User Manual
Page 132
132
Rockwell Automation Publication 20B-UM002G-EN-P - July 2014
Appendix C
Application Notes
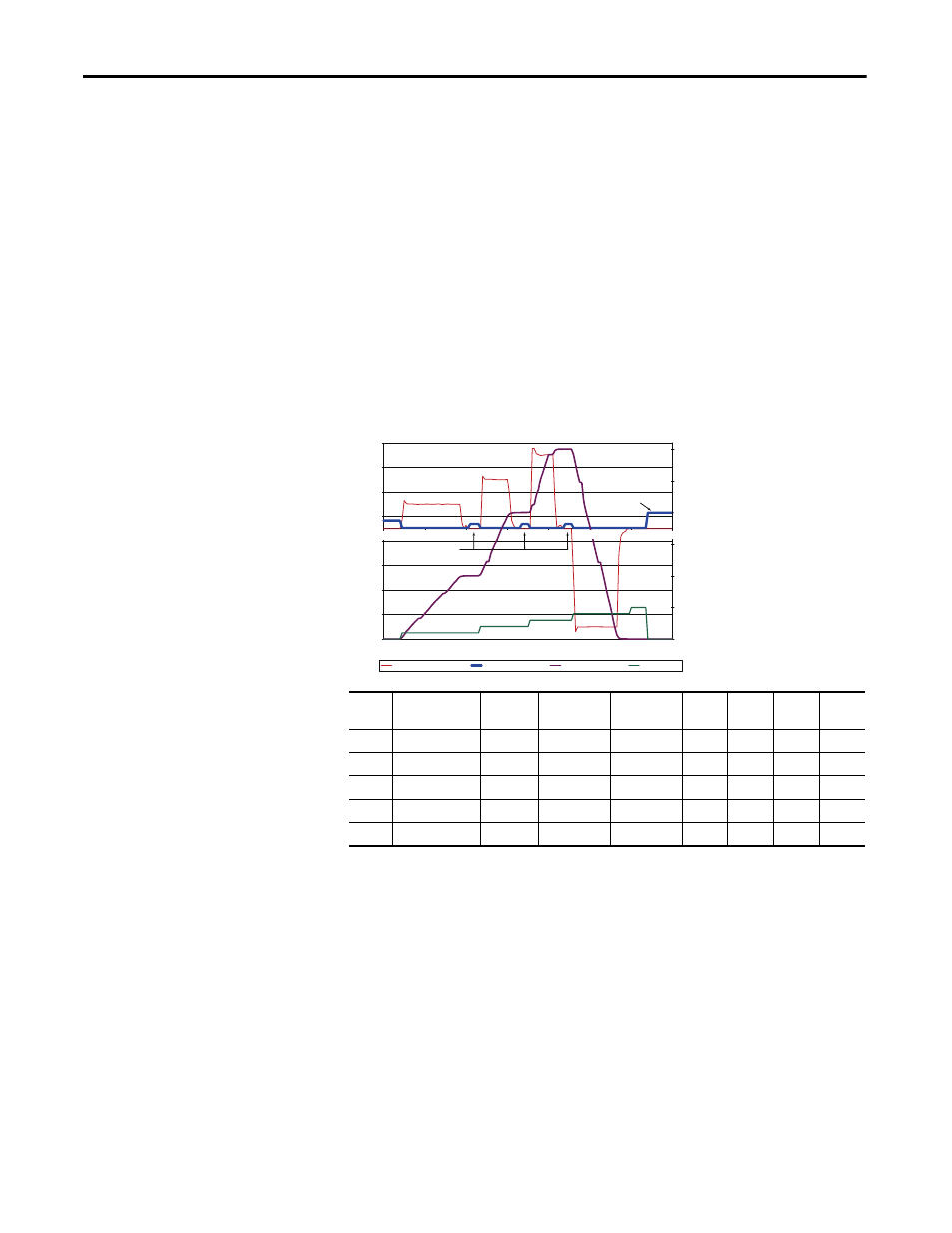
Example 3: Five Step Positioner with Incremental Encoder
The first three steps of this indexer are “Encoder Incr” steps followed by an
“Encoder Abs” step to zero and then an “End Hold Position” step. For each
“Encoder Incr” step the drive ramps at [Step x AccelTime] to [Step x Velocity] in
the direction of the sign of [Step xValue]. It then decelerates at the rate of [Step x
DecelTime] to the position programmed in [Step x Value] which sets the desired
units of travel for the step. When the value programmed in [Step x Value] is
reached within the tolerance window programmed in [Encoder Pos Tol], the “At
Position” bit is set in [Profile Status]. In this example a dwell value held each of
the first three steps “At Position” for 1 second. After the [Step x Dwell] time
expires, the profile transitions to the next step. The absolute step is used to send
the profile back to the home position. This is accomplished by programming
[Step 4 Value] to zero.
Figure 15 - Encoder Incremental w/Dwell Example
Step #
[Step x Type]
[Step x
Velocity]
[Step x
AccelTime]
[Step x
DecelTime]
[Step x
Value]
[Step x
Dwell]
[Step x
Batch]
[Step x
Next]
1
Encoder Incr
100
0.5
0.5
10.00
1.00
1
2
2
Encoder Incr
200
0.5
0.5
10.00
1.00
1
3
3
Encoder Incr
300
0.5
0.5
10.00
1.00
1
4
4
Encoder Abs
400
0.5
0.5
0.00
1.00
N/A
5
5
End Hold Position
N/A
N/A
0.5
N/A
0.00
N/A
N/A
90
110
130
150
190
0
5
10
15
20
25
30
Step 1
Step 2
Step 3
Time
Complete
At Position
Step 4
Step 5
-50
-150
-250
-350
-450
50
150
250
350
70
210
[Encoder Speed], 415
[Units Traveled], 701
Current Step
[Profile Status], 700
170
Encoder Speed
Units Traveled
Profile Status
Current Step