Position regulated step types and parameters – Rockwell Automation 20B PowerFlex 700 AC Drives Vector Control (v4.001 and up) User Manual
Page 127
Rockwell Automation Publication 20B-UM002G-EN-P - July 2014
127
Application Notes
Appendix C
Encoder Incremental Blend (EncIncrBlend)
When started, the drive will ramp to the desired velocity and hold speed until the
units of travel programmed is reached (within tolerance window). The profile
will then transition to the next step and the drive will ramp to the speed of the
new step without first going to zero speed.
Encoder Incremental Blend with Hold
This profile is the same as the previous, but contains the “Hold” function. While
“Hold” is applied, the step transition is inhibited. When released, the step can
then transition if the conditions to transition are satisfied.
Parameter Level (Param Level)
When started, the drive will ramp to the desired velocity, hold speed and
compare the parameter value of the parameter number programmed in [Step
Value] to the [Step Dwell] level. The sign of the [Step Value] defines “less than or
greater than” [Step Dwell]. When true, the profile will transition to the next step.
End
The drive ramps to zero speed and stops the profile. It clears the current step bits
and sets the “Complete” bit (14) in [Profile Status], parameter 700.
Position Regulated Step Types and Parameters
Each of the Position Regulated steps has the following associated parameters or
functions:
Encoder Absolute
This is a move to an absolute position, which is referenced from the home
position. When started the drive ramps to the desired velocity in the direction
required, holds the speed, then ramps to zero speed landing or ending at the
commanded position within the tolerance window.
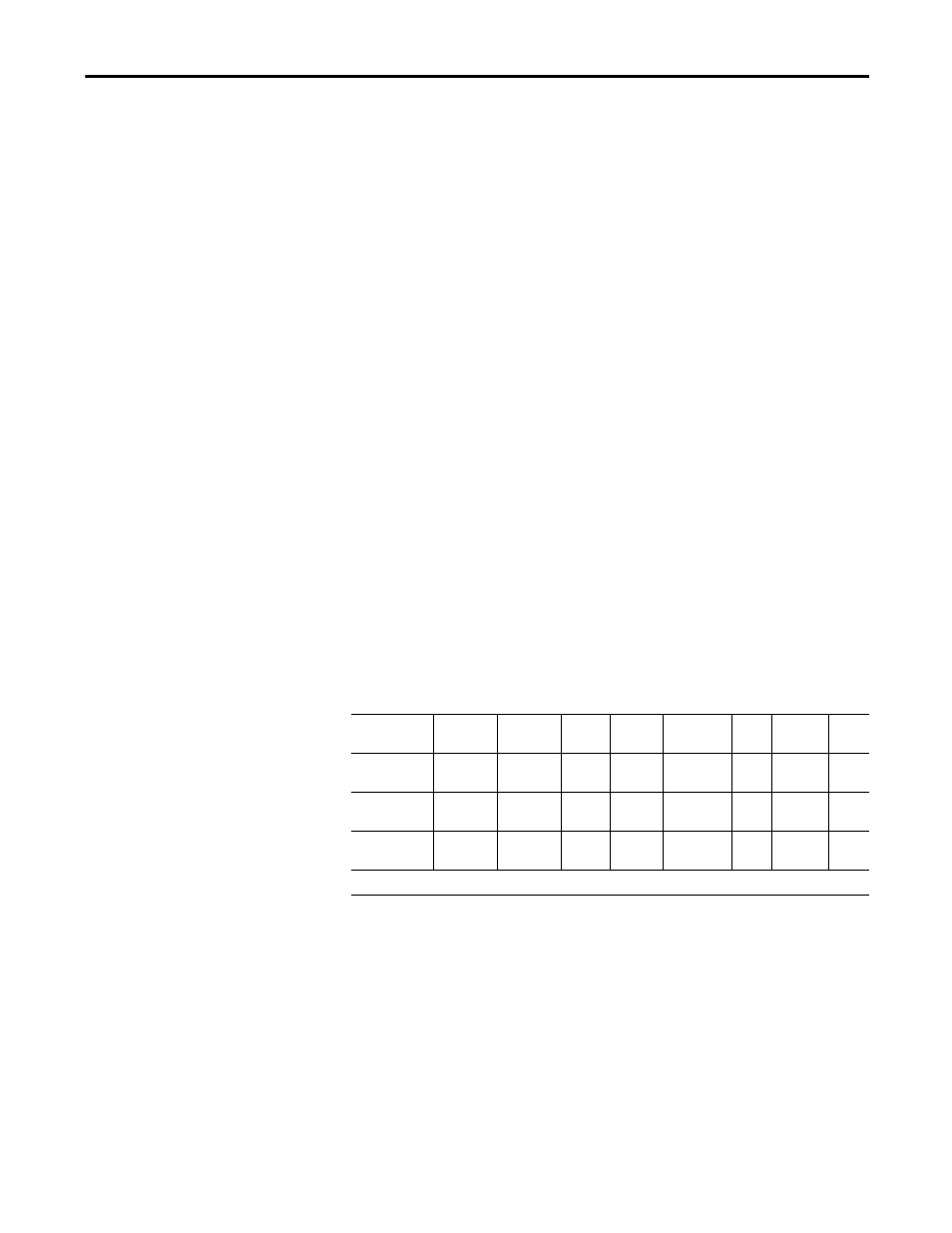
Step Type
Value
Velocity
Accel
Time
Decel
Time
Next Step
Condition
Dwell
Batch
Next
Encoder
Absolute
Position &
Direction
Speed
Accel
Rate
Decel
Rate
At Position
Dwell
Time
NA
Next
Step
Encoder
Incremental
Position &
Direction
Speed
Accel
Rate
Decel
Rate
At Position
Dwell
Time
Batch
Number
Next
Step
End Hold
Position
NA
NA
NA
NA
At Position
Dwell
Time
NA
Stop
NA = Function not applicable to this step type