Homing routine, Encoder incremental (encoder incr), End hold position – Rockwell Automation 20B PowerFlex 700 AC Drives Vector Control (v4.001 and up) User Manual
Page 128: Figure 10 - homing to marker
128
Rockwell Automation Publication 20B-UM002G-EN-P - July 2014
Appendix C
Application Notes
Encoder Incremental (Encoder Incr)
This is a move increment from the current position in the direction, distance and
speed programmed. When started the drive ramps to the desired velocity, holds
the speed, then ramps to zero speed landing or ending at the commanded
position within the tolerance window.
End Hold Position
The drive holds the last position and stops the profile after dwell time expires.
Must be used with position regulated profile. Do Not use “End.”
Homing Routine
Each time the profile/indexer is enabled, the drive requires a home position to be
detected. The following options are available:
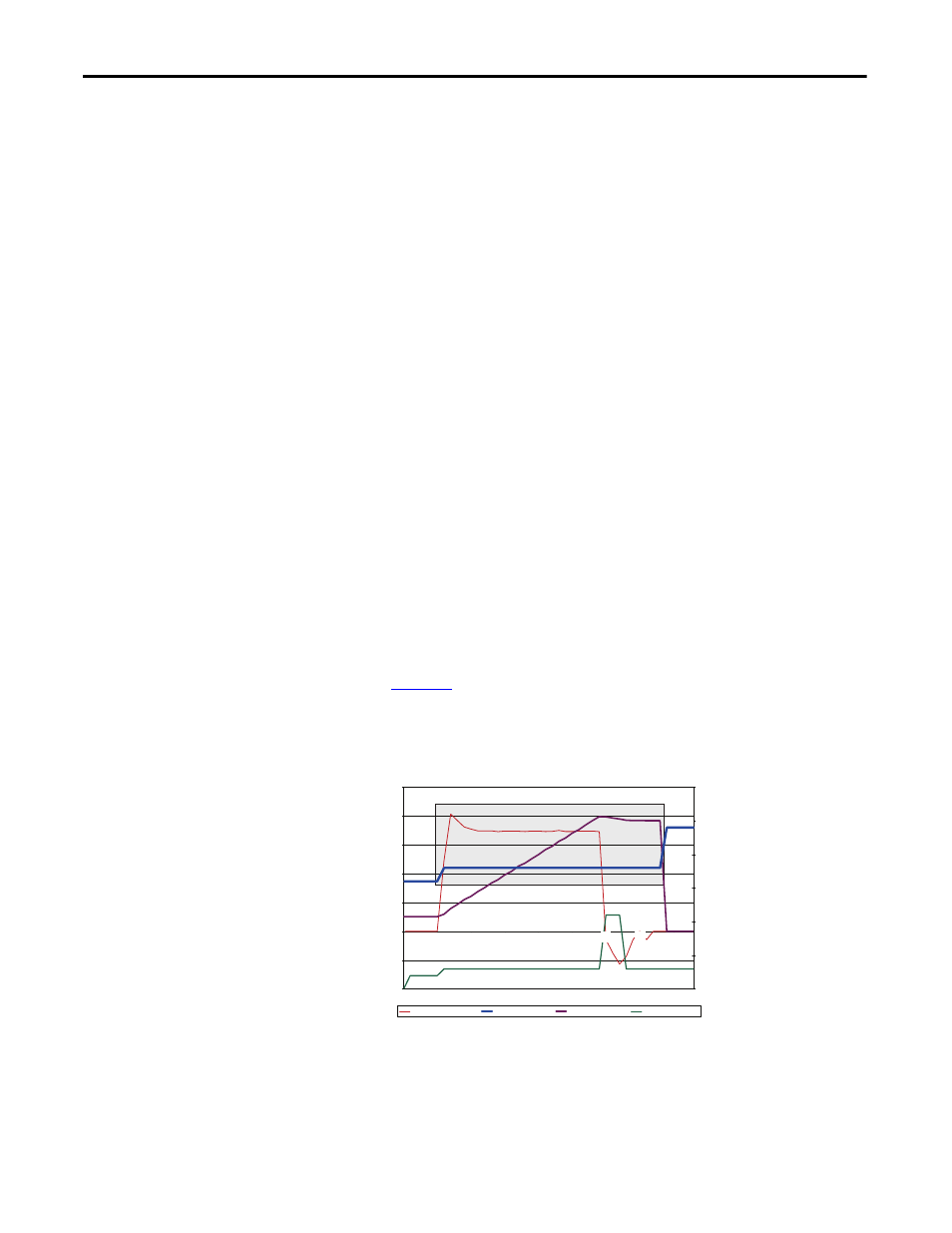
• Homing to Marker Pulse with Encoder Feedback
When “Find Home” is commanded the homing routine is run when a start
command is issued. The Homing bit (11) in [Profile Status] will be set
while the homing routine is running. The drive will ramp to the speed and
direction set in [Find Home Speed], parameter 713 at the rate set in [Find
Home Ramp], parameter 714 until the digital input defined as “Home
Limit” is activated. The drive will then ramp to zero and then back up to
first marker pulse prior to the Home Limit switch at 1/10 the [Find Home
Speed]. When on the marker pulse, the At Home bit (13) is set in [Profile
Status] and the drive is stopped.
shows the sequence of operation for homing to a marker pulse.
[Encoder Z Chan], parameter 423 must be set to “Marker Input” or
“Marker Check” for this type of homing.
Figure 10 - Homing to Marker
-100
-50
0
50
100
150
200
250
2
7
12
17
22
27
42
0
5
10
15
20
25
30
[Encoder Speed], 415
[Units Traveled], 701
[Dig In Status], 216
[Profile Status], 700
Find Home Command
Start Command
Home Limit Input
At Home
Homing
37
32
Encoder Speed
Profile Status
Units Traveled
Digital In Status