Rockwell Automation 20B PowerFlex 700 AC Drives Vector Control (v4.001 and up) User Manual
Page 36
36
Rockwell Automation Publication 20B-UM002G-EN-P - July 2014
Chapter 1
Programming and Parameters
SPEED C
O
MMAND
Proc
ess
P
I
132 [PI Upper Limit]
Sets the upper limit of the PI output.
Default:
Min/Max:
Units:
+[Maximum Freq]
100%
–/+400.0 Hz
–/+800.0%
0.1 Hz
0.1%
…
133 [PI Preload]
Sets the value used to preload the integral
component on start or enable.
Default:
Min/Max:
Units:
0.0 Hz
100.0%
[PI Lower Limit]/
[PI Upper Limit]
0.1 Hz
0.1%
…
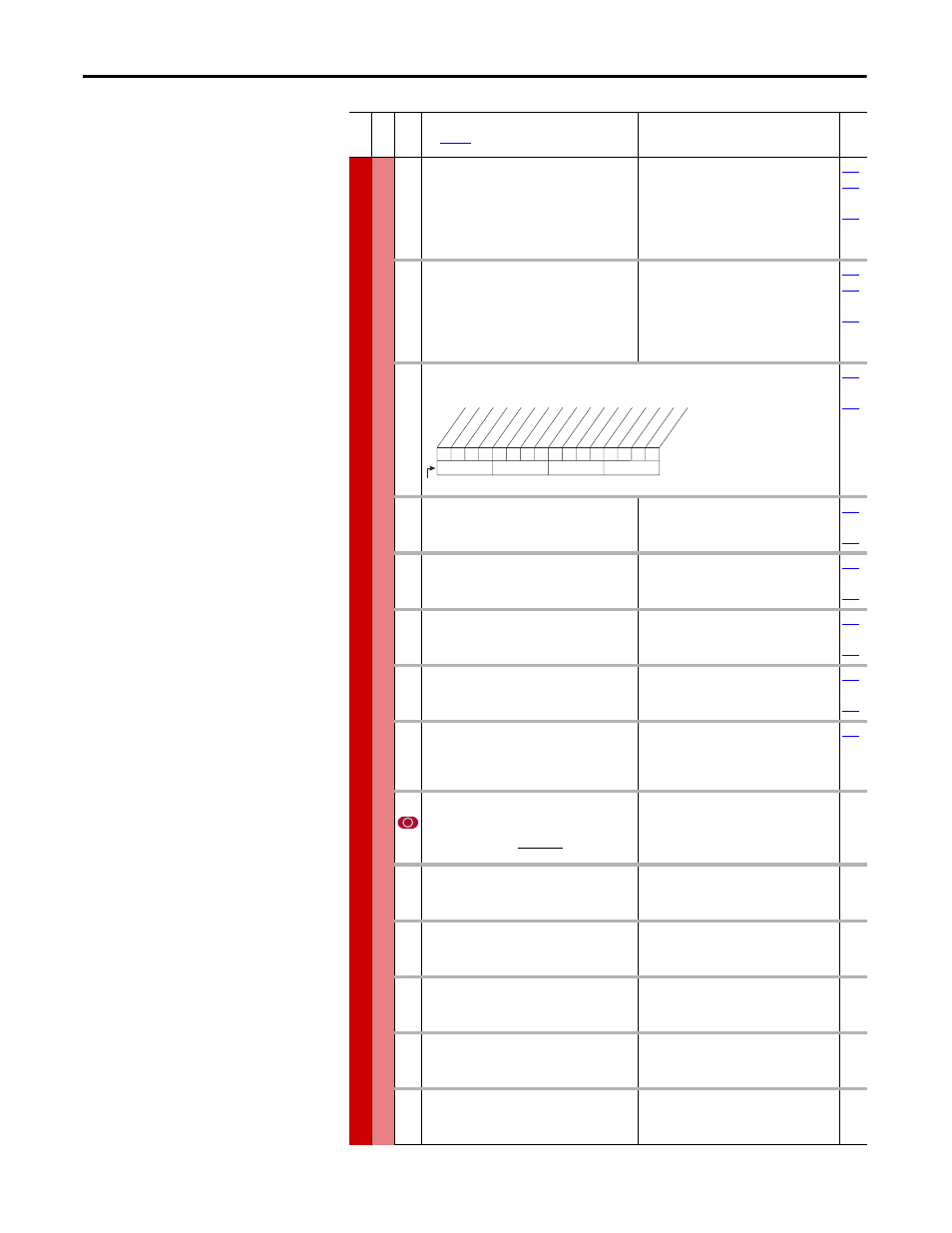
134 [PI Status]
Status of the Process PI regulator.
Read Only
…
135 [PI Ref Meter]
Present value of the PI reference signal.
Default:
Min/Max:
Units:
Read Only
–/+100.0%
0.1%
…
136 [PI Fdback Meter]
Present value of the PI feedback signal.
Default:
Min/Max:
Units:
Read Only
–/+100.0%
0.1%
…
137 [PI Error Meter]
Present value of the PI error.
Default:
Min/Max:
Units:
Read Only
–/+200.0%
0.1%
…
138 [PI Output Meter]
Present value of the PI output.
Default:
Min/Max:
Units:
Read Only
–/+800.0%
0.1%
…
139 [PI BW Filter]
Provides filter for Process PI error signal. The
output of this filter is displayed in [PI Error
Meter]. Zero will disable the filter.
Default:
Min/Max:
Units:
0.0 Radians
0.0/240.0 Radians
0.1 Radians
459 [PI Deriv Time]
Refer to formula below:
Default:
Min/Max:
Units:
0.00 Secs
0.00/100.00 Secs
0.01 Secs
460 [PI Reference Hi]
Scales the upper value of [PI Reference Sel].
Default:
Min/Max:
Units:
100.0%
–/+100.0%
0.1%
461 [PI Reference Lo]
Scales the lower value of [PI Reference Sel].
Default:
Min/Max:
Units:
–100.0%
–/+100.0%
0.1%
462 [PI Feedback Hi]
Scales the upper value of [PI Feedback Sel].
Default:
Min/Max:
Units:
100.0%
–/+100.0%
0.1%
463 [PI Feedback Lo]
Scales the lower value of [PI Feedback Sel].
Default:
Min/Max:
Units:
0.0%
–/+100.0%
0.1%
464 [PI Output Gain]
Sets the gain factor for [PI Output Meter].
Default:
Min/Max:
Units:
1.000
–/+8.000
0.001
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 16
for symbol descriptions
Values
Rela
ted
0
0
0
0
x
x
x
x
x
x
x
x
x
x
x
x
10
0
1
2
3
4
5
6
7
8
9
11
12
13
14
15
1 = Condition True
0 = Condition False
x = Reserved
Bit #
PI Enabled
PI Hold
PI Reset
PI InLimit
d
PI Error
(%)
d
t
(Sec)
PI
Out
= KD (Sec) x