Drive setup, Set (see – Rockwell Automation 20B PowerFlex 700 AC Drives Vector Control (v4.001 and up) User Manual
Page 115
Rockwell Automation Publication 20B-UM002G-EN-P - July 2014
115
Application Notes
Appendix C
Drive Setup
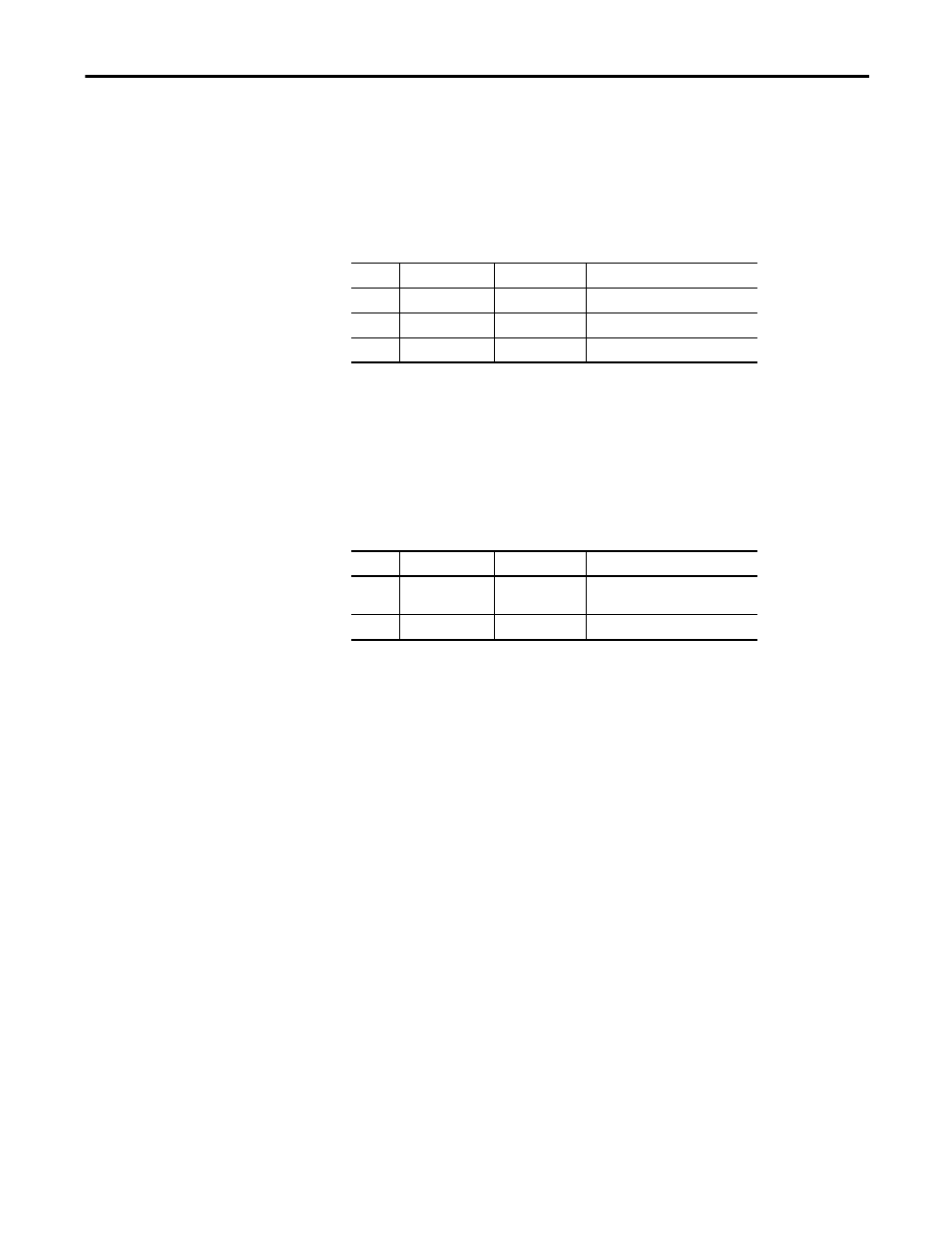
TorqProve with Encoder
To Enable TorqProve with an encoder, bit 0 of [TorqProve Cnfg], parameter 600
must be set to “1.” Once this is set, a Type 2 alarm will be active until the
following settings are entered:
In addition, [Stop Mode A/B], parameters 155/156 must be set to option “1,
Ramp” and [DC Brake Time], parameter 159 must be set to “0.0 Secs.”
Encoderless TorqProve
To Enable Encoderless TorqProve, both bits 0 and 1 of [TorqProve Cnfg],
parameter 600 must be set to “1.” Once this is set, a Type 2 alarm will be active
until the following settings are entered:
In addition, [Stop Mode A/B], parameters 155/156 must be set to option “1,
Ramp” and [DC Brake Time], parameter 159 must be set to “0.0 Secs.”
Encoderless Guidelines
You can not hold zero speed in encoderless mode or operate near zero speed
because of this, it is very important to set [Minimum Speed], parameter 81 to
two or three times the slip frequency when in encoderless mode. (Example: A
1740 RPM motor has 2 Hz of slip. Set [Minimum Speed] to 4…6 Hz.)
In addition, [Stop Mode A/B], parameters 155/156 must be set to option “1,
Ramp” and [DC Brake Time], parameter 159 must be set to “0.0 Secs.”
Also set [Float Tolerance], parameter 606 to
one to three times the slip
frequency when in encoderless mode. You should also use fast accel and decel
times (less than 2 seconds) when operating in encoderless mode.
No.
Name
Value
Notes
053
[Motor Cntl Sel]
“4, FVC Vector”
080
[Feedback Select]
“3, Encoder”
412
[Motor Fdbk Type]
“1, Quad Check”
No.
Name
Value
Notes
053
[Motor Cntl Sel]
“4, FVC Vector” or
“0, Sensrls Vect”
080
[Feedback Select]
“1, Slip Comp”