Figure 13 - time example – Rockwell Automation 20B PowerFlex 700 AC Drives Vector Control (v4.001 and up) User Manual
Page 130
130
Rockwell Automation Publication 20B-UM002G-EN-P - July 2014
Appendix C
Application Notes
• Position Redefine
When “Pos Redefine” is set, the present position is established as Home
and [Units Traveled] is set to zero.
• Disable Homing Requirement
If a home position is not required, the routine can be disabled by clearing
[Alarm Config 1], bit 17 (Prof SetHome) to “0.” This will disable the
alarm from being set when Pos/Spd Profile mode is configured in [Speed/
Torque Mod] and will set the present position as Home.
Once Homing is complete the Find Home command must be removed to
allow the profile to be run. If the Find Home command is not removed,
when the drive is started the routine will see that it is At Home and the
drive will stop.
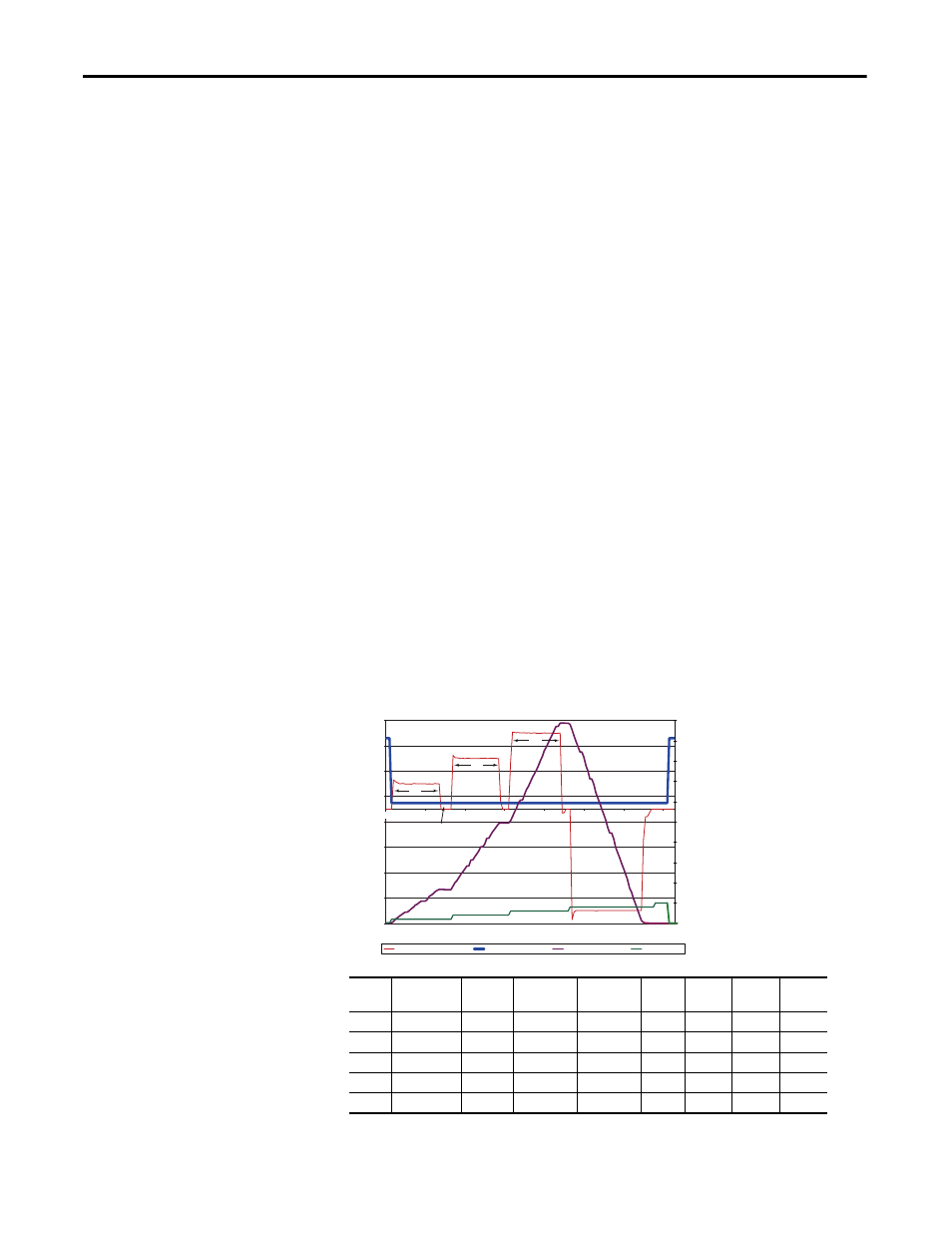
Example 1: Five Step Velocity Profile (Time-Based and Encoder-
Based)
The first three steps are “Time” steps followed by an “Encoder Abs” step to zero
and then an “End” step. For each Time step the drive ramps at [Step x
AccelTime] to [Step x Velocity] in the direction of the sign of [Step x Velocity].
The drive then decelerates at [Step X DecelTime] to zero. The [Step X Value] is
programmed to the desired time for the total time of the accel, run and decel of
the step. Each step has a 1 second time programmed in [Step X Dwell] which is
applied to the end of each step. After the dwell time expires, the profile
transitions to the next step. The absolute step is used to send the profile back to
the home position. This is done by programming [Step 4 Value] to zero.
Figure 13 - Time Example
Step #
[Step x Type]
[Step x
Velocity]
[Step x
AccelTime]
[Step x
DecelTime]
[Step x
Value]
[Step x
Dwell]
[Step x
Batch]
[Step x
Next]
1
Time
100
0.5
0.5
5.00
1.00
1
2
2
Time
200
0.5
0.5
5.00
1.00
1
3
3
Time
300
0.5
0.5
5.00
1.00
1
4
4
Encoder Abs
400
0.5
0.5
0.00
1.00
1
5
5
End
N/A
N/A
0.5
N/A
0.00
N/A
N/A
5s
5s
5s
Step 1
Step 2
Step 3
Time
Step 4
Step 5
-450
-150
-250
-350
50
-50
150
250
350
0
25
20
15
10
5
35
30
40
45
50
33
Note: there is no "At Position"
indication when using timed steps
53
73
93
153
113
133
13
[Encoder Speed], 415
[Units Traveled], 701
Current Step
[Profile Status], 700
Encoder Speed
Units Traveled
Profile Status (Scaled)
Current Step