IAI America IX-NSN6016H User Manual
Page 72
64
7. Specifications
Top
position
Tool
Bottom
position
Tool
Center of
rotational axis
Tool
40
Tool’s center of
gravity
Tool
Center of
rotational axis
φ 100
(Fig. 1)
(Fig. 2)
(Fig. 3)
(Fig. 4)
Item
Specifications
Surrounding air temperature/humidity
Temperature: 0 to 40
°
C, humidity: 20 to 85%RH or less
(non-condensing)
Operating
environment
s
s
e
l
r
o
0
0
0
,
1
m
e
d
u
t
i
t
l
A
B
d
e
s
i
o
N
73
Robot weight
kg
34.5
Air purge pressure (Note 11)
Pressure in a range of 0.05 to 0.6 MPa immediately before
the bellows inflates
Power supply
230 V 50/60 Hz 8 A
Allowable supply voltage
fluctuation
%
±
10
Overvoltage category (IEC
I
I
I
y
r
o
g
e
t
a
C
)
1
-
4
6
6
0
6
Controller
(Note 13)
3
e
e
r
g
e
d
n
o
i
t
u
ll
o
P
)
1
-
4
6
6
0
6
C
E
I
(
e
e
r
g
e
d
n
o
i
t
u
ll
o
P
Note 1)
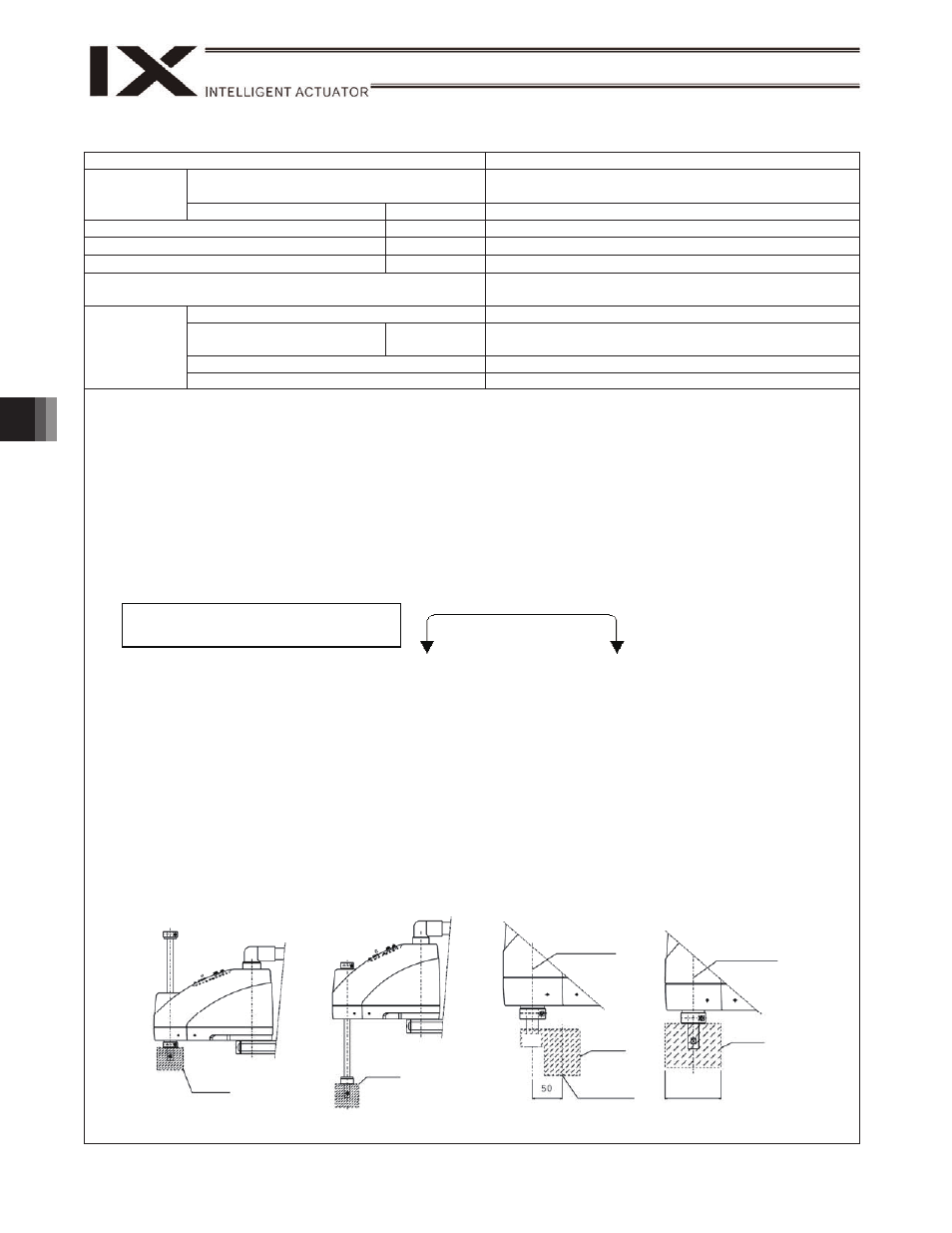
To move the robot horizontally at high speed, perform teaching so that the vertical axis stays as close to the top position as
possible. (Fig. 1)
To operate the robot with its vertical axis at the bottom position, the speed and acceleration must be reduced as appropriate.
(Fig. 2)
Note 2)
Assuming PTP instruction operation. The maximum composite speed is not the maximum speed of CP operation.
Note 3)
Positioning precision when the robot is operated repeatedly to one specified position from the same starting position at the same
speed and acceleration/deceleration using the same arm (at a constant surrounding air temperature of 20
°
C). Take note that this
is not the absolute positioning precision.
Also note that the positioning repeatability may deviate from the specified value if the arm is changed, positioning is performed to
one specified position from multiple positions, or any of the operating conditions such as operating speed and
acceleration/deceleration setting is changed.
Note 4)
Measured when the robot is operated at the maximum speed, carrying a load of 2 kg.
This cycle time assumes a reciprocating operation involving a vertical travel of 25 mm and horizontal travel of 300 mm. (Rough
positioning)
Note 5)
The permissible moment of inertia converted to a value at the rotational center of axis 4. The offset from the rotational center of
axis 4 to the tool’s center of gravity is assumed to be 50 mm or less. (Fig. 3)
If the tool’s center of gravity is further away from the rotational center of axis 4, the speed and acceleration must be reduced as
appropriate.
Note 6)
If the tool exceeds the permissible diameter, it will contact the robot inside the robot’s range of movement. (Fig. 4)
Note 7)
To enable the alarm LED indicator, the user must provide a circuit that supplies 24 VDC to the LED terminal in the user connector
in response to the controller I/O output signal, etc.
Note 8)
Push force when driver card parameter No. 38, “Push torque limit during positioning” is set to 70%.
Note 9)
Push force when driver card parameter No. 38, “Push torque limit during positioning” is set to 20%.
Although this parameter can be set to a desired value from 15 to 70%, push force will not stabilize if the set value is outside the
range of 40 to 70%.
Note 10) Connector pins 1 to 23 can be used. Pin 24 is connected to a shield wire and cannot be used as a signal wire.
Note 11) Increase the pressure to a level within a range of 0.05 to 0.6 MPa until immediately before the bellows inflates, and adjust the
flow rate using the speed controller. The fluid used should be clean, dry air free from compressor oil, etc., and the air filtration
rating should be 10
μm or less.
Note 12) The dust-proof/splash-proof specification is based on a dust-proof/splash-proof structure corresponding to protection class IP65
against intrusion of water and powder dust as specified by the IEC standard. The structure is not explosion-proof.
Note 13) The controller structure is not dust-proof or splash-proof.
Reference design standards: Annex I to Machine Directives, EN292-1, EN292-2, EN1050, EN60204-1, EN775
Note: Continuous operation at the
maximum speed is not feasible.
25 mm
300 mm
Brake power source for main unit
W
DC24VI10% 20W