Caution – IAI America IX-NSN6016H User Manual
Page 105
97
1
1. Precautions for Use
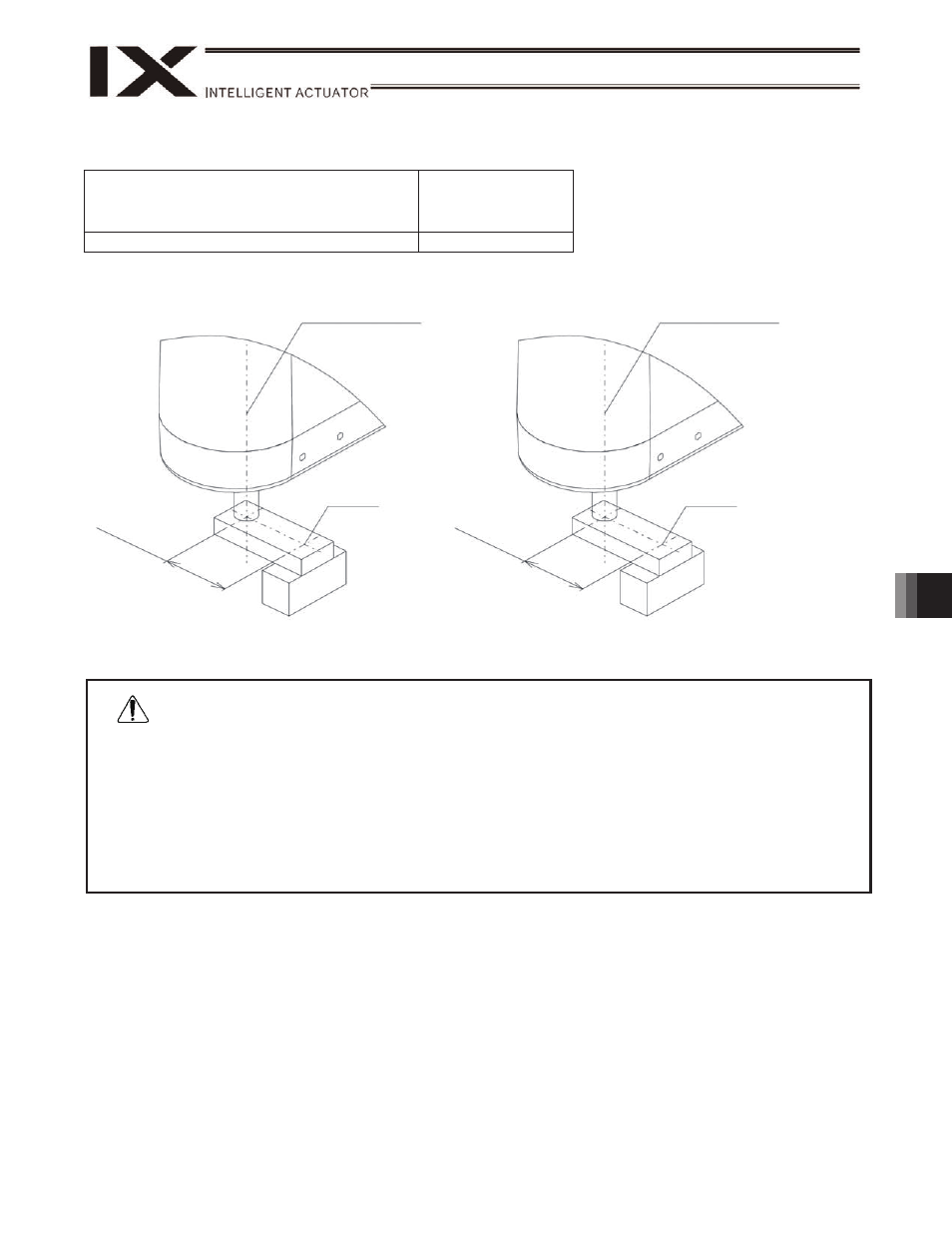
Load offset (from the center of axis 4 (rotational axis))
IX-NNN50
H/60 H/70 H/80 H
IX-NNW50
H/60 H/70 H/80 H
IX-NNC50
H/60 H/70 H/80 H
50 mm or less
IX-NSN5016H/6016H
40 mm or less
x Set appropriate acceleration/deceleration according to the mass of the end and moment of inertia. Failure to
do so may cause the drive part to wear prematurely or may result in damage or vibration.
x If vibration occurs, lower the acceleration/deceleration as appropriate.
x If the load gets offset, the robot becomes more likely to cause vibration. Design the tools so that the load’s
center of gravity aligns with the center of axis 4.
x Do not move the robot horizontally with axis 3 (vertical axis) extended. It may cause the vertical axis to bend
and disable the axis. To move the robot horizontally with axis 3 extended, adjust the speed and
acceleration/deceleration as appropriate.
Center of axis 4 (rotational axis)
Load’s center of gravity
50 mm or less
Caution
Center of axis 4 (rotational axis)
Load’s center of gravity
40 mm or less