A-73, 4 ) connection number (param02), 5 ) option (param03) – Yaskawa MP2300S Basic Module User Manual
Page 395: 6 ) function code (param04)
Appendix G MSG-SND/MSG-RCV Functions (Ethernet)
G.1 Message Transmit Function (MSG-SND)
A-73
Appendices
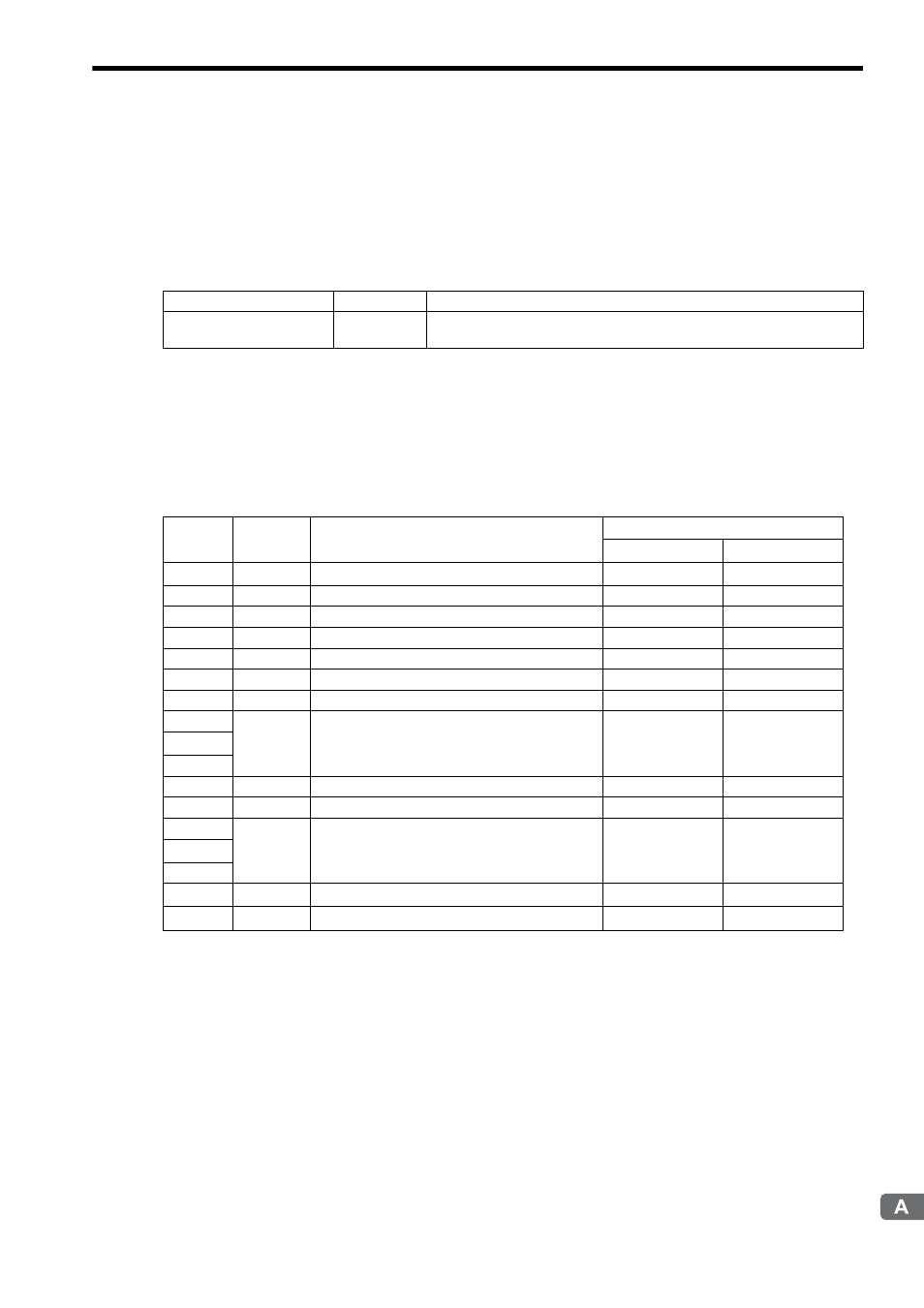
( 4 ) Connection Number (PARAM02)
Refer to G.1.4 Function Setting and Parameter Details for MEMOBUS and Extended MEMOBUS Protocols.
( 5 ) Option (PARAM03)
Choose a unique setting for each communication device.
The following table provides the scope of the setting.
( 6 ) Function Code (PARAM04)
Set a function code to transmit.
The functions (read coil and input relay state, write to holding register, etc.) registered in the function codes are made
available by specifying the code.
The following table shows the available function codes when using MODBUS/TCP as a protocol.
Note: 1. B: Bit type, W: Integer type
2.
√: Available, –: Not available
3. Transmit and receive registers in the master operation mode are MW (MB) only.
4. In the slave operation mode, coil, holding register, input relay, and input register are MB, MW, IB, IW
respectively.
Communication Device
Valid Range
Remarks
Ethernet(218IF or 218IFA)
0 to 247, 255
Set a remote unit ID when MODBUS/TCP protocol is used.
When the transmission target is MP2000 series, specify “0.”
Table G.12 Function Code List (MODBUS/TCP)
Function
Code
Target Data
Type
Function
Communication device
Ethernet(218IF)
Ethernet(218IFA)
00H
–
Unused
–
–
01H
B
Reads coil state
√
√
02H
B
Reads input relay state
√
√
03H
W
Reads holding register content
√
√
04H
W
Reads input register content
√
√
05H
B
Changes single coil state
√
√
06H
W
Writes to single holding register
√
√
07H
:
–
Unused
–
–
0EH
0FH
B
Changes multiple coil states
√
√
10H
W
Writes to multiple holding registers
√
√
11H
:
–
Unused
–
–
15H
16H
W
Mask writes to holding register
–
√
17H
W
Reads/Writes multiple holding registers
–
√