A-65, 9 ) remote cpu number (param07) – Yaskawa MP2300S Basic Module User Manual
Page 387
Appendix G MSG-SND/MSG-RCV Functions (Ethernet)
G.1 Message Transmit Function (MSG-SND)
A-65
Appendices
( 9 ) Remote CPU Number (PARAM07)
Set a remote CPU number.
When the remote device is MP2000 series, specify “1”.
When the remote device is a controller manufactured by YASKAWA Electric Corporation, but other than the MP2000
series, and comprises multiple CPU modules, specify the destination CPU number.
Otherwise, specify “0”.
( 10 ) Offset (PARAM08 to PARAM11)
Specify the offset addresses of read data storage areas and write data source of the transmission side.
The address for the transmission side will be displaced by the number of words designated by the offset.
Note: 1. For more information, refer to G.1.8 Relationship between Data Address, Data Size, and Offset for
MSG-SND Function.
2. The offset cannot be a negative value.
The offset parameter is prepared for each target data type.
The following table lists the offset parameters.
The valid offset parameter may differ, depending on the function code.
The following table provides the valid parameters for each function code.
Note:
√: Available, –: Not available
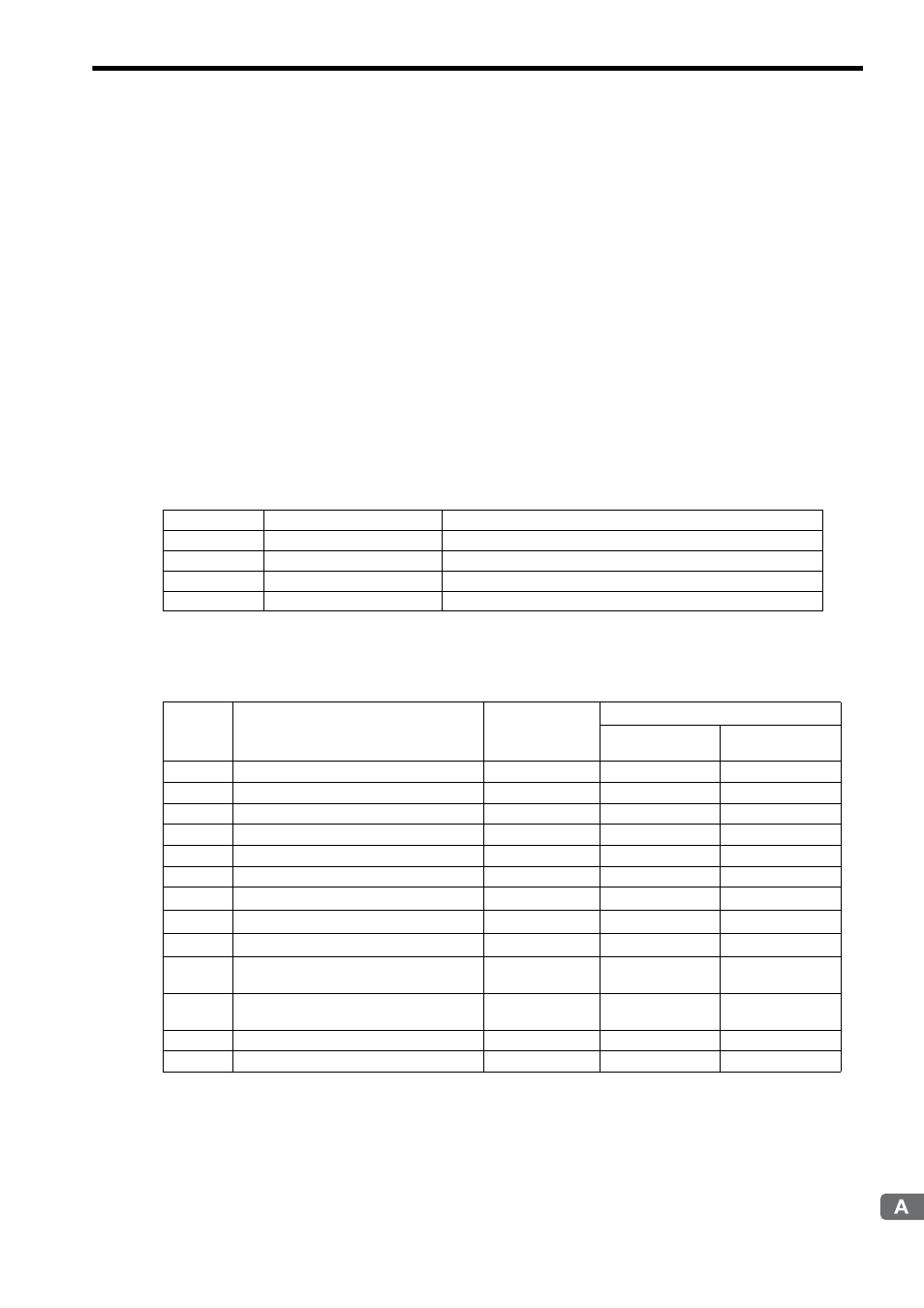
Table G.4 Offset Parameter List
Parameter
Content
Description
PARAM08
Coil offset
Sets the coil's offset word address.
PARAM09
Input relay offset
Sets the offset word address of an input relay.
PARAM10
Input register offset
Sets the offset word address of an input register.
PARAM11
Holding register offset
Sets the offset word address of a holding register.
Table G.5 Valid Parameter List for Offset of Each Function Code
Function
Code
Function
Valid Offset
Parameter
Protocol Type
Extended
MEMOBUS
MEMOBUS
01H
Reads coil state
PARAM08
√
√
02H
Reads input relay state
PARAM09
√
√
03H
Reads holding register content
PARAM11
√
√
04H
Reads input register content
PARAM10
√
√
05H
Changes single coil state
PARAM08
√
√
06H
Writes to single holding register
PARAM11
√
√
09H
Reads holding register content (extended)
PARAM11
√
–
0AH
Reads input register content (extended)
PARAM10
√
–
0BH
Writes to holding register (extended)
PARAM11
√
–
0DH
Discontinuously reads holding register
(extended)
PARAM11
√
–
0EH
Discontinuously writes to holding register
(extended)
PARAM11
√
–
0FH
Changes multiple coil states
PARAM08
√
√
10H
Writes to multiple holding registers
PARAM11
√
√