Yaskawa MP2300S Basic Module User Manual
Page 153
5.2 User Programs
5.2.2 Motion Programs
5-20
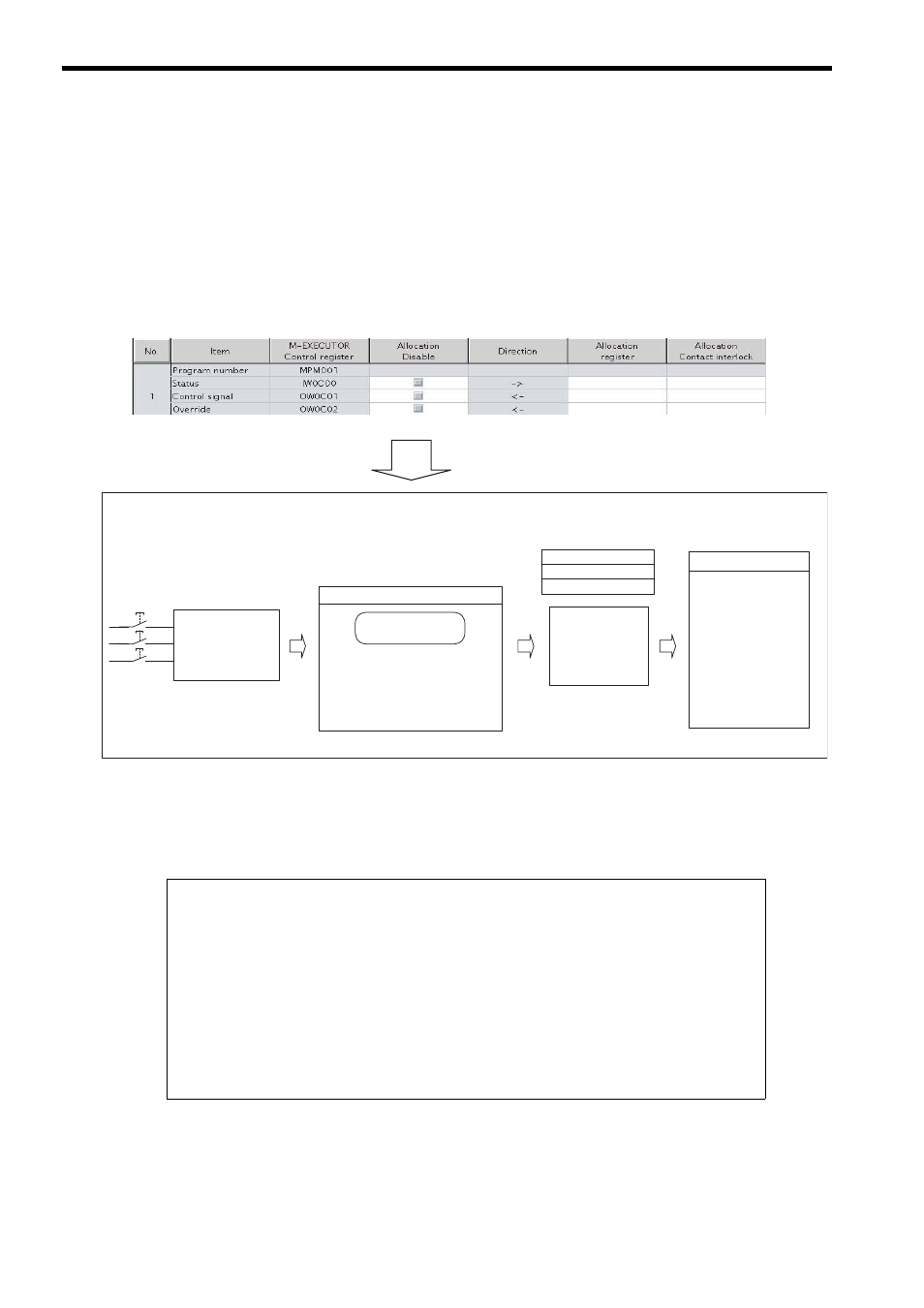
A Way to Control a Motion Program via a Sequence or Ladder Program
Without using the allocating function of the above mentioned M-EXECUTOR control register, controls a motion
program via a sequence or ladder program.
To use this execution processing, save the blank Allocation register and the blank Allocation interlock contact as
a blank.
In this case, the M-EXECUTOR control register configures and monitors the motion program.
The following figure shows a setting example in this method.
Each example which uses a sequence program and ladder program respectively as a program for controlling the
motion program is shown as follows:
1.
Example using a sequence program
Save the mapping register and the mapping
interlock contact as a blank.
MPM001
END
VEL [a1] 5000 [b1]..
FMX T10000000;
IAC T25;
IDC T30;
MOV [a1] 300. [b1]..
MVS [a1] 200. [b1]..
.
.
.
.
M-EXECUTOR program execution definition
DWG.H
Ladder for controlling
a motion program
Program for controlling a motion program
DEND
Ladder program
.
.
.
.
.
.
.
.
External signal
- Operation startup
- Pause
- Stop, etc.
Status
Control signal
Override for interpolation
Reference of
M-EXECUTOR
control register
Execution control using a
motion management function
Motion program
OB80000 = IB00000;
“axis 1 servo on”
OB0C010 = PON( IB00001 DB000000 ); “program start”
OB0C011 = IB00002;
“hold”
OB0C012 = IB00003;
“program stop”
OB0C015 = IB00004;
“alarm reset”
OB8000F = IB00005;
“Turn ON a single axis servo”
IF NON( IB0C000 DB000001 ) == 1;
“Is the program operation OFF?”
;
“Process when program operation is stopped”
IEND;
END;