2 ) mode 1 ( 3 ) function 1 – Yaskawa JAPMC-MC2300 User Manual
Page 99
5.4 MP2000 Series Machine Controller Parameter Details
5.4.2 Motion Setting Parameter Details
5-27
5
Motion Parameters
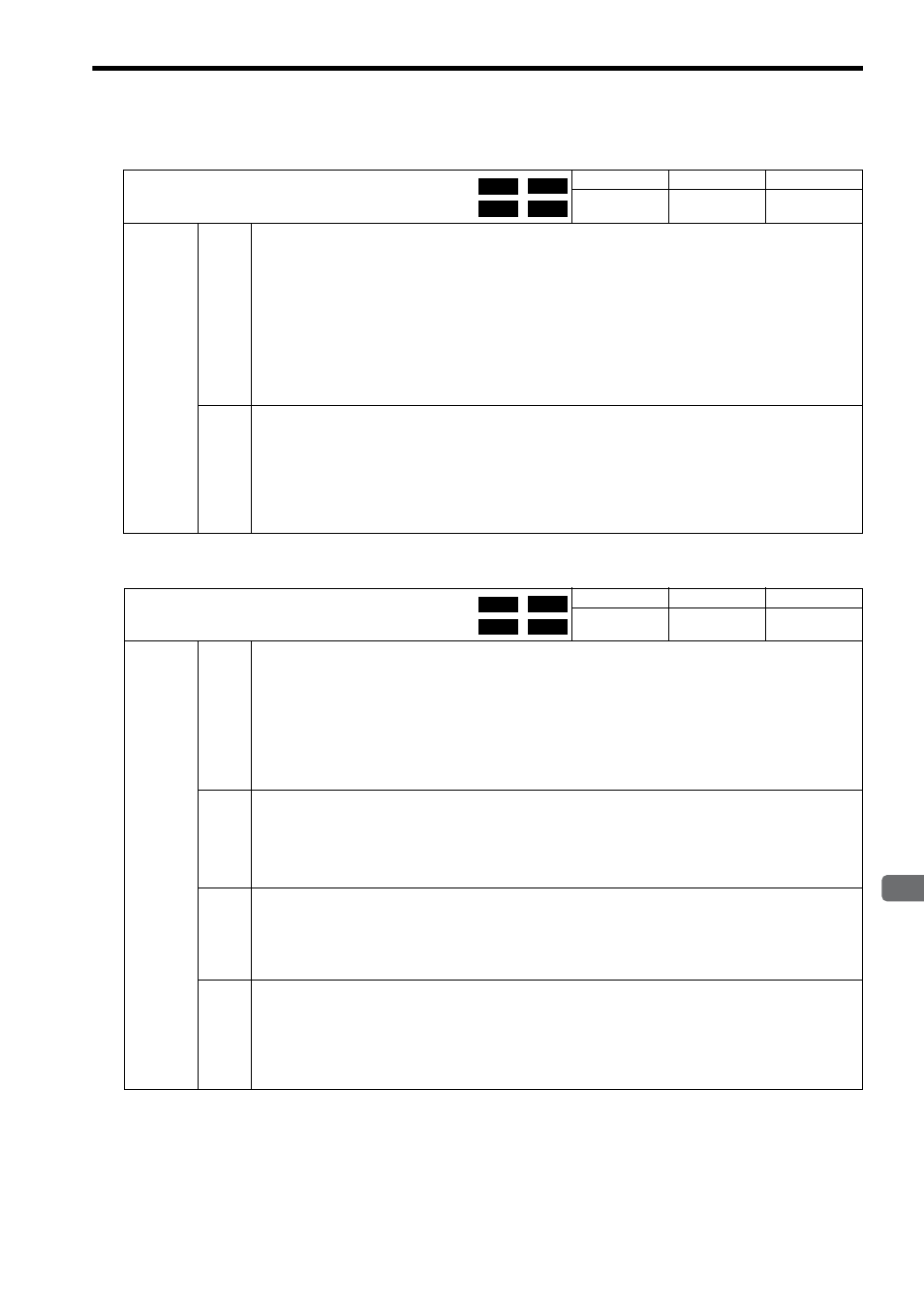
( 2 ) Mode 1
( 3 ) Function 1
OW
01
Mode Setting 1
Setting Range
Setting Unit
Default Value
−
−
0000H
Description
Bit 0
Excessive Deviation Error Level Setting
Set whether excessively following errors are treated as warnings or as alarms.
0: Alarm (default): Axis stops operating when an excessively following error is detected.
1: Warning: Axis continues to operate even if an excessively following error is detected.
When the absolute value of deviation amount
>
40000000H, Excessive Deviation alarm (IW
04, bit 9) will
occur and the execution of motion command will be ended in error regardless of the setting of this bit.
Related Parameters
OL
22: Error Count Alarm Detection
IL
02, bit 0: Warning (Excessive Deviation)
IL
04, bit 9: Alarm (Excessive Deviation)
Bit 2
Speed Compen. in Pos. Mode
Set whether or not to enable the speed compensation during position control.
0: Disabled (default)
1: Enabled
Setting this bit to 1 (Enabled) will validate the following two speed compensation values.
OW
31: Speed compensation
OL
16: Secondly speed compensation
OW
03
Function Setting 1
Setting Range
Setting Unit
Default Value
−
−
0011H
Description
Bit 0 to
Bit 3
Speed Unit Selection
Set the unit for speed references.
0: Reference unit/s
1: 10
n
reference unit/min (default) (n = number of decimal places/fixed parameter 5)
2: 0.01%
3: 0.0001%
Refer to 6.1.5 Speed Reference on page 6-9 for setting examples when also setting of the
combination with the number of digits below the decimal point.
Bit 4 to
Bit 7
Acceleration/Deceleration Unit Selection
Set whether to specify acceleration/deceleration rates (reference unit/s
2
) or acceleration/deceleration time con-
stants (ms) for acceleration/deceleration commands.
0: Reference units/s
2
1: ms (default)
Bit 8 to
Bit B
Filter Type Selection
Set the acceleration/deceleration filter type.
0: Filter none (default)
1: Exponential acceleration/deceleration filter
2: Moving average filter
Bit C to
Bit F
Torque Unit Selection
Set the unit for torque reference as a percentage of rated torque.
0: 0.01% (default)
1: 0.0001%
The unit for torque reference indicates the torque reference resolution, but not guarantees the
torque accuracy.
Position
Phase
Speed Torque
Position
Phase
Speed Torque