2 motion setting parameter details, 1 ) run commands – Yaskawa JAPMC-MC2300 User Manual
Page 97
5.4 MP2000 Series Machine Controller Parameter Details
5.4.2 Motion Setting Parameter Details
5-25
5
Motion Parameters
5.4.2 Motion Setting Parameter Details
The following tables provide details of motion setting parameters.
Refer to 5.3.2 Setting Parameter List on page 5-8 for a list of the motion setting parameters.
Register number “OW
00” indicates the leading output register number + 00. Other register numbers listed below
indicate output register numbers in the same way. Refer to 5.1.1 Motion Parameter Register Numbers for MP2000
Series Machine Controllers on page 5-2 for information on how to find the leading output register number.
in the following descriptions indicate that parameter is enabled in position control,
phase control, speed control, or torque control. Similarly,
in the following descriptions
indicate that parameter is disabled in position control, phase control, speed control, or torque control.
The table below shows the relationship between each control mode and motion command.
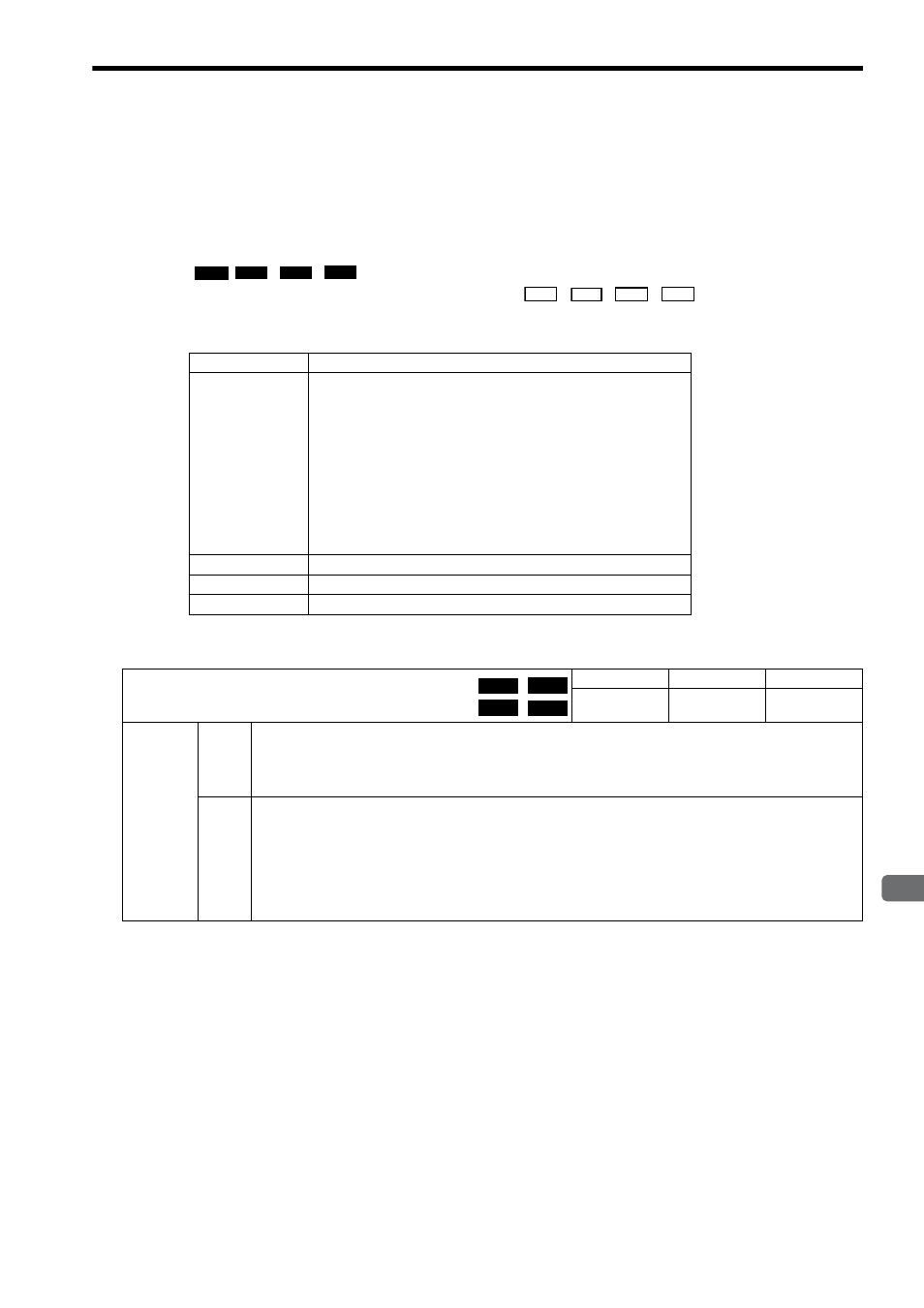
( 1 ) RUN Commands
Control Mode
Motion Command (OW
08)
Position Control
0: NOP
No command
1: POSING
Positioning
2: EX_POSING
External positioning
3: ZRET
Zero point return
4: INTERPOLATE
Interpolation
5: ENDOF_INTERPOLATE
For system use
6: LATCH
Interpolation with latch function
7: FEED
JOG operation
8: STEP
STEP operation
Phase Control
25: PHASE
Phase reference
Speed Control
23: VELO
Speed reference
Torque Control
24: TRQ
Torque reference
Position
Phase
Speed
Torque
Speed
Torque
Position
Phase
OW
00
RUN Command Setting
Setting Range
Setting Unit
Default Value
−
−
0000H
Description
Bit 0
Servo ON
Sends a SERVO ON command to the SERVOPACK.
0: Servo OFF (default)
1: Servo ON
Bit 1
Machine Lock
0: OFF (default)
1: ON
During the machine lock mode, the Calculated Position in Machine Coordinate System (CPOS) (monitoring
parameter IL
10) will be updated but no movement will occur on the axis.
A change in the machine lock mode is valid after all pulses have been distributed. The machine lock mode can-
not be changed during speed or torque control.
Position
Phase
Speed Torque