2 ) holding, 3 ) aborting – Yaskawa JAPMC-MC2300 User Manual
Page 144
7.2 Motion Command Details
7.2.1 Positioning (POSING)
7-4
5.
Set OW
08 to 0 to execute the NOP motion command to complete the positioning operation.
Terminology: Command execution
When a command code is stored in the motion command register (OW
08), execution of the motion command correspond-
ing to that code is started. Used in describing motion command operations.
( 2 ) Holding
Axis travel can be stopped during command execution and then the remaining travel can be restarted. A command is
held by setting the Holds A Command bit (OW
09, bit 0) to 1.
• Set the Holds A Command bit (OW
09, bit 0) to 1. The axis will decelerate to a stop.
• When the axis has stopped, the Command Hold Completed bit (IW
09, bit 1) will turn ON.
• Reset the Holds A Command bit (OW
09, bit 0) to 0. The command hold status will be cleared and the
remaining portion of the positioning will be restarted.
( 3 ) Aborting
Axis travel can be stopped during command execution and the remaining travel canceled by aborting execution of a
command. A command is aborted by setting the Interrupt A Command bit (OW
09, bit 1) to 1.
• Set the Interrupt A Command bit (OW
09, bit 1) to 1. The axis will decelerate to a stop.
• When the axis has stopped, the remain travel will be canceled and the Positioning Completed bit (IW
0C,
bit 1) will turn ON.
• The positioning will restart if the Interrupt A Command bit (OW
09, bit 1) is reset to 0 during abort pro-
cessing.
• This type of operation will also be performed if the motion command is changed to NOP during axis move-
ment.
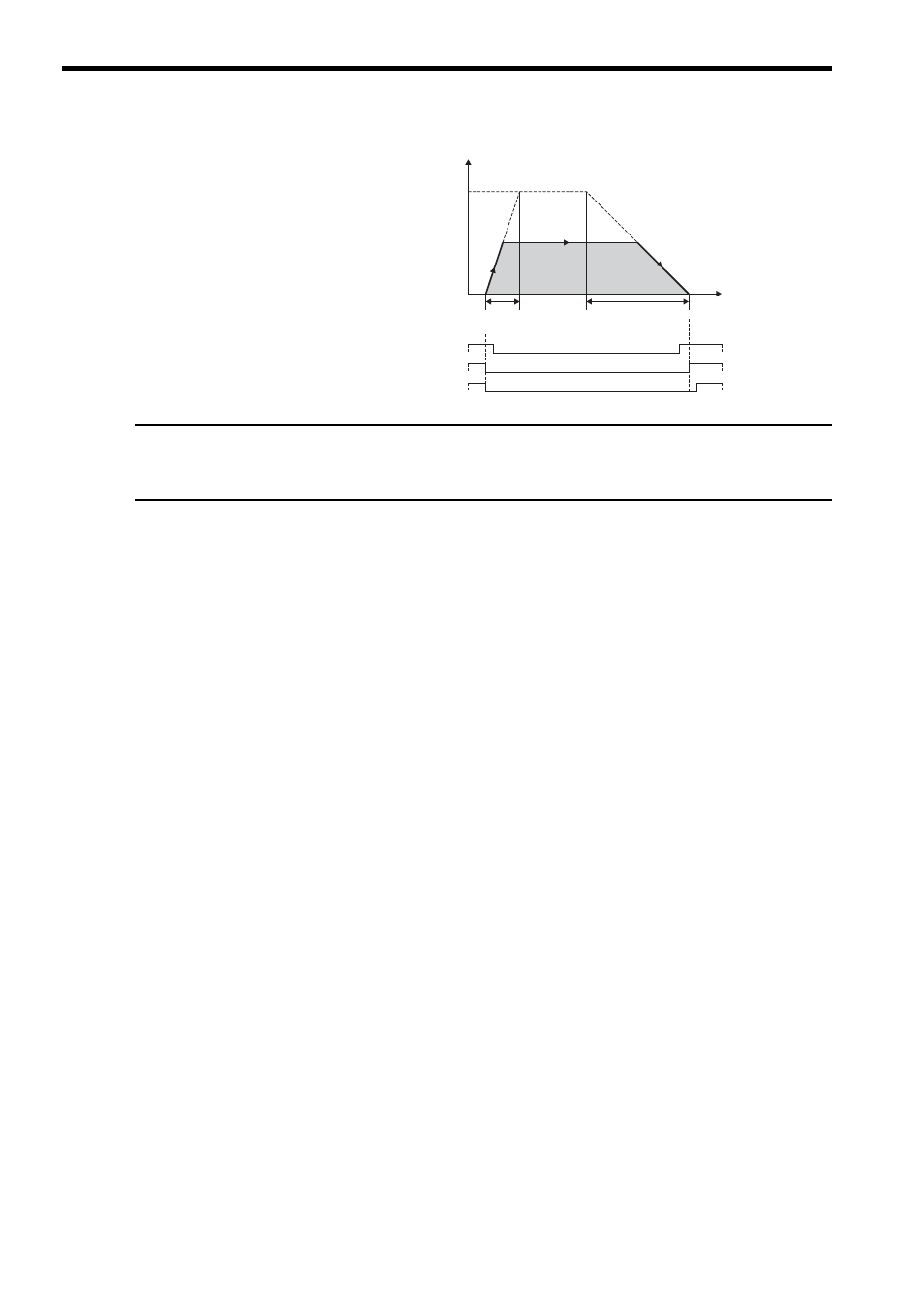
Speed
Rated Speed
Speed Reference
Setting
Position Reference Setting
(OL
10)
(OL
1C)
Acceleration Time Constant
(OL
36)
Deceleration Time Constant
(OL
38)
Time
NEAR Position
(IW
0C, bit 3)
Discharging Completed
(IW
0C, bit 0)
Positioning Completed
(IW
0C, bit 1)
100 (%)
0
POSING Operation Pattern