3 ) aborting, 4 ) related parameters – Yaskawa JAPMC-MC2300 User Manual
Page 218
7.2 Motion Command Details
7.2.10 Torque Reference (TRQ)
7-78
( 3 ) Aborting
The TRQ command can be canceled by aborting execution of a command. A command is aborted by setting the Inter-
rupt A Command bit (OW
09 bit1) to 1.
• Set the Interrupt A Command bit (OW
09, bit 1) to 1, the axis will decelerate to a stop in the speed mode.
Once the axis stops, the control mode will change to the position control mode and the abort processing will
be completed.
• The TRQ command will restart if the Interrupt A Command bit (OW
09, bit 1) is reset to 0 during abort
processing.
• Setting the Interrupt A Command bit (OW
09, bit 1) to 0 after the abort processing has been completed
will not restart the execution of TRQ command.
• This type of operation will also be performed if the motion command is changed to NOP during operation
with torque control mode.
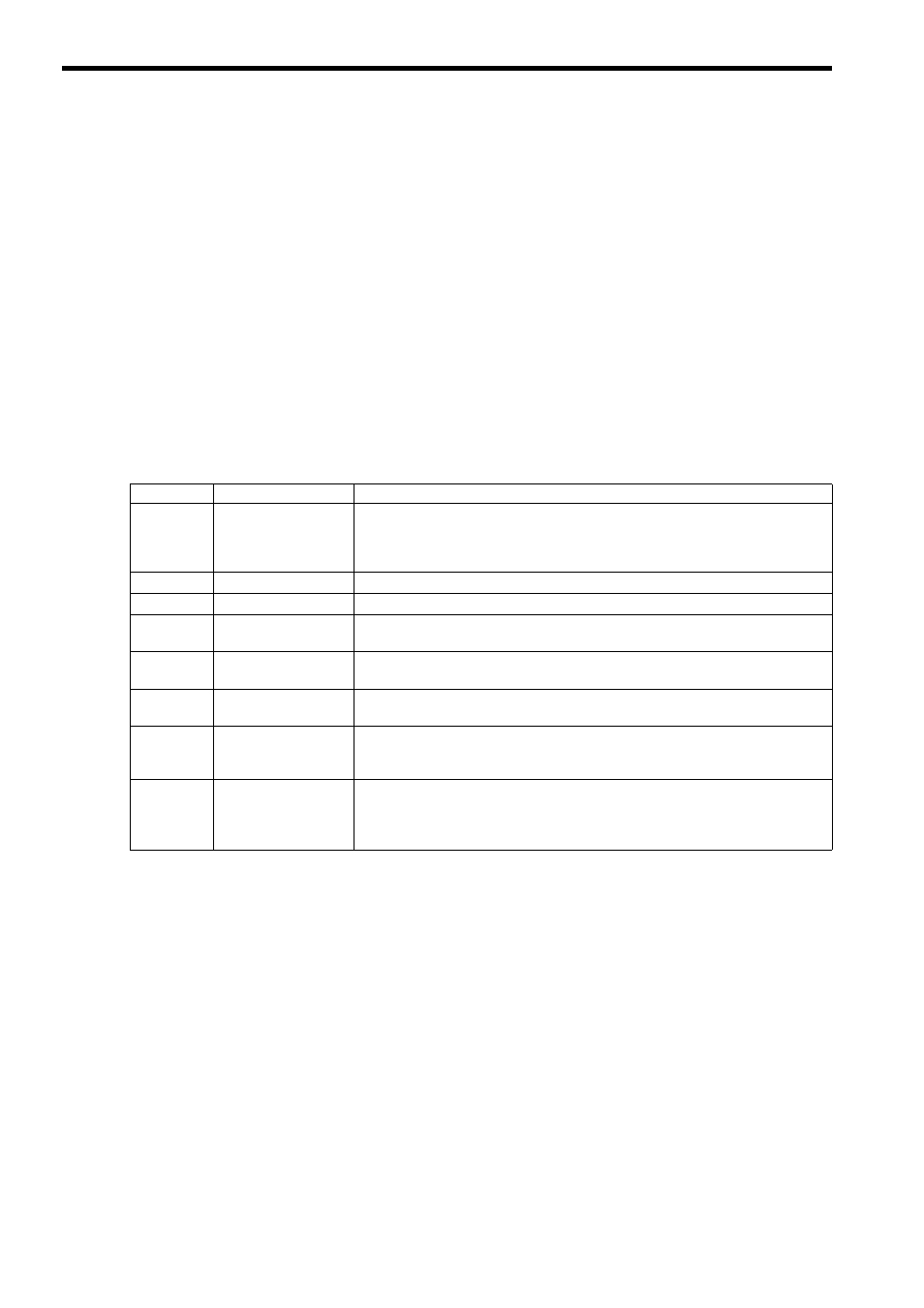
( 4 ) Related Parameters
[ a ] Setting Parameters
Parameter
Name
Setting
OW
00
Bit 0
Servo ON
Turn the power to the Servomotor ON and OFF.
1: Power ON to Servomotor, 0: Power OFF to Servomotor
Motor will start to rotate when the Servo is turned ON after switching to Torque Control
Mode.
OW
03
Function Setting 1
Set the unit for torque reference.
OW
08
Motion Command
The mode is changed to torque control mode when this parameter is set to 24.
OW
09
Bit 0
Holds A Command
The axis will stop if this bit is set to 1 during torque reference operation.
The operation will restart if this bit is set to 0 while the command is being held.
OW
09
Bit 1
Interrupt A Command
An axis will decelerate to a stop if this bit is set to 1 during operation.
OL
0C
Torque/Thrust
Reference Setting
Set the torque reference. This setting can be changed during operation.
The unit depends on the Function Setting 1 (OW
03, bits C to F).
OL
0E
Speed Limit Setting at
the Torque/Thrust
Reference
Set the speed limit for torque references. The speed limit is set as a percentage of the
rated speed.
OL
38
Straight Line
Deceleration/
Deceleration Time
Constant
Set the rate of deceleration or deceleration time for aborting the command.