3 performance specifications – Yaskawa JAPMC-MC2300 User Manual
Page 25
1.2 Specifications
1.2.3 Performance Specifications
1-8
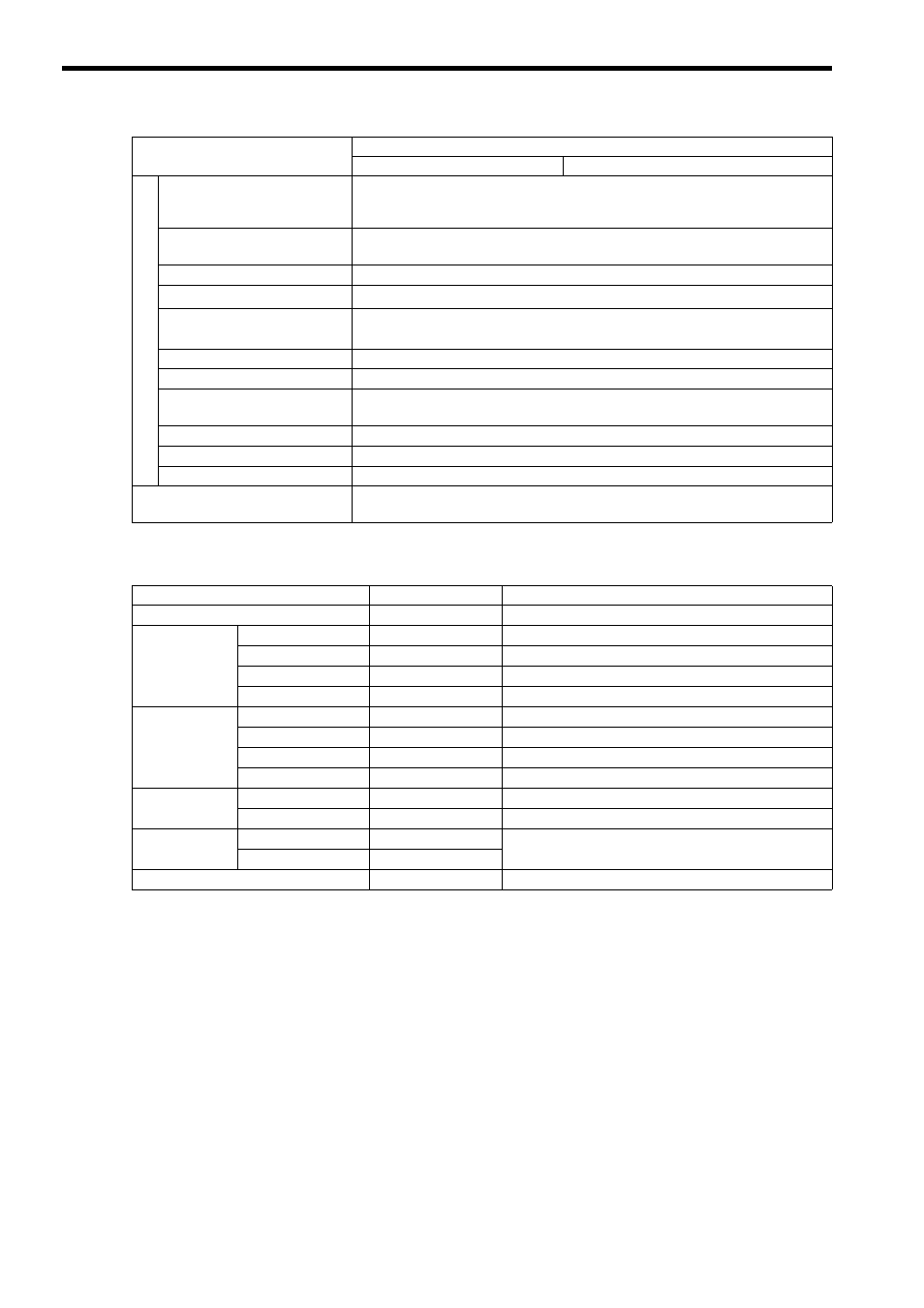
1.2.3 Performance Specifications
M
o
tion
F
u
nc
tio
n
s
Motion Commands
Positioning, external positioning, zero point return, interpolation, interpolation with posi-
tion detection function, JOG operation, STEP operation, speed reference, torque/thrust
reference, phase control, etc.
Acceleration/Deceleration
Methods
1-step asymmetrical trapezoidal acceleration/deceleration, exponential acceleration/
deceleration filter, moving average filter
Position Units
pulse, mm, inch, degree
Speed Units
Reference unit/sec, 10
n
reference unit/min, rated speed percentage designation
Acceleration/Deceleration
Units
Reference unit/sec
2
, ms (acceleration time from 0 to rated speed, deceleration time from
rated speed to 0)
Torque Units
Rated torque percentage designation
Electronic Gear
Supported
Position Control Methods
Finite length position control, infinite length position control, absolute infinite length
position control, simple absolute infinite length position control
Software Limits
One each in forward and reverse directions
Zero Point Return Types
17
Latch Function
Phase-C latch, external signal input latch
Self-configuration Function
Modules can be automatically allocated to the Machine Controller.
(Axes must be manually allocated.)
Item
Specifications
Remarks
Control Cycle
500
μs
D/A
Resolution
16 bits
PWM output
Output Delay
1 ms (*)
* When changing full-scale from
−10 V to +10 V
Accuracy
100 mV max.
Temperature Drift
100
μV/°C max.
A/D
Resolution
16 bits
Input Delay
250
μs
Accuracy
100 mV max.
Temperature Drift
100
μV/°C max.
DO
OFF
→ ON
1
μs
ON
→ OFF
1
μs
DI
OFF
→ ON
30
μs
ON
→ OFF
600
μs
Pulse Input Rage
4 Mpps
16 Mpps for input pulse multiplier of 4
Item
Details
Function
Remarks