Yaskawa JAPMC-MC2300 User Manual
Page 86
5.3 Motion Parameter Lists
5.3.3 Monitoring Parameter List
5-14
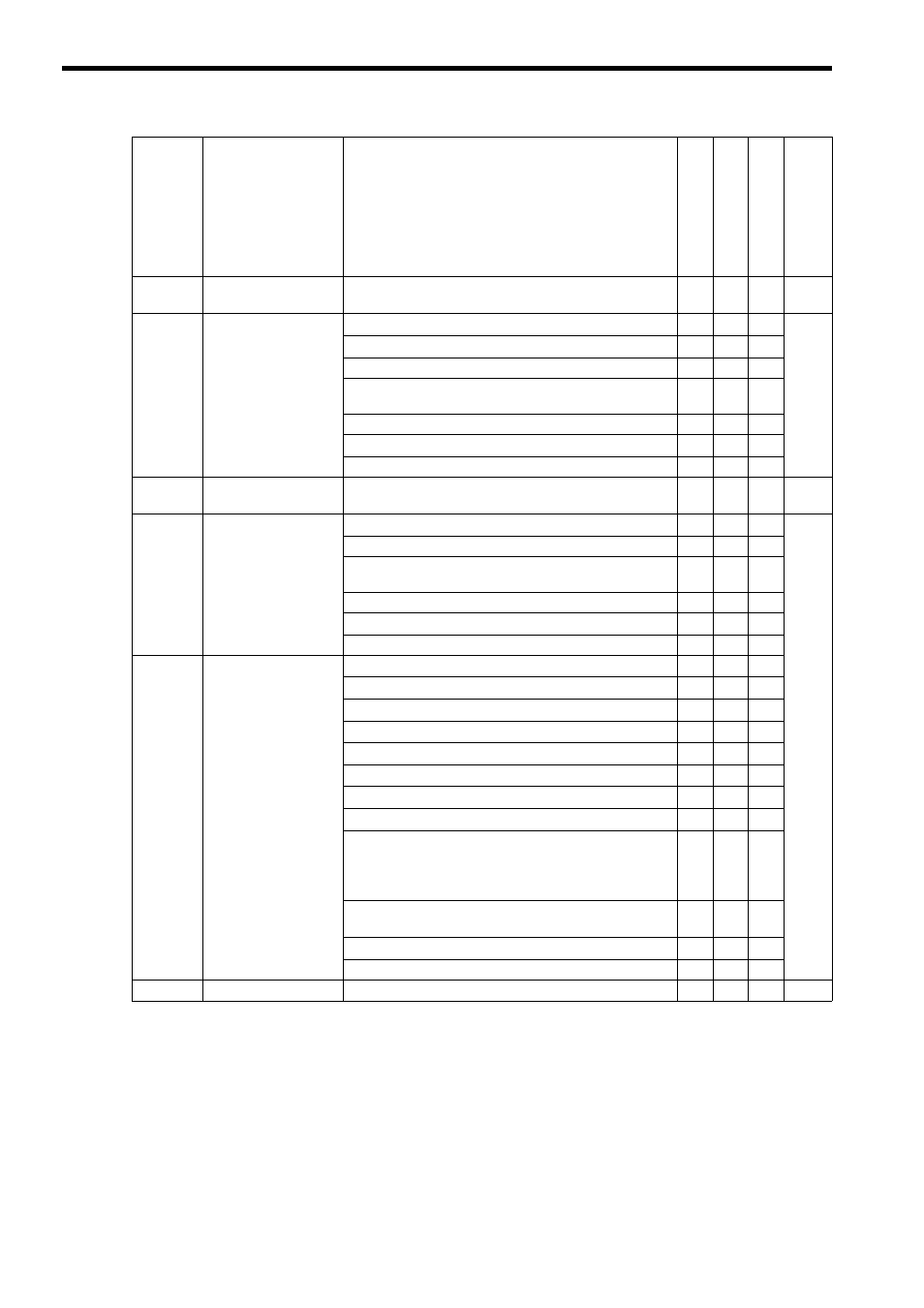
IW
08
Motion Command Re-
sponse Code
Same as OW
08 (Motion Command)
P.5-46
IW
09
Motion Command Sta-
tus
Bit 0: Command Execution Flag (BUSY)
P.5-46
Bit 1: Command Hold Completed (HOLD)
Bit 2: Reserved for system use
-
-
-
Bit 3: Command Error Completed Status
(Command Error Occurrence) (FAIL)
Bits 4 to 7: Reserved for system use
-
-
-
Bit 8: Command Execution Completed (COMPLETE)
Bits 9 to F: Reserved for system use
IW
0A
Motion Subcommand
Response Code
Same as OW
0A (Motion Subcommand)
P.5-47
IW
0B Subcommand Status
Bit 0: Command Execution Flag
P.5-47
Bits 1 and 2: Reserved for system use
-
-
-
Bit 3: Command Error Completed Status
(Command Error Occurrence)
Bits 4 to 7: Reserved for system use
-
-
-
Bit 8: Command Execution Completed
Bits 9 to F: Reserved for system use
-
-
-
IW
0C
Position Management
Status
Bit 0: Discharging Completed (DEN)
Bit 1: Positioning Completed (POSCOMP)
Bit 2: Latch Completed (LCOMP)
Bit 3: NEAR Position (NEAR)
Bit 4: Zero Point Position (ZERO)
Bit 5: Zero Point Return (Setting) Completed (ZRNC)
Bit 6: During Machine Lock (MLKL)
Bit 7: Absolute Position Read-out Completed
Bit 8: ABS Rotary Pos. LOAD Complete (ABS system infi-
nite length position control information load com-
pleted) (ABSLDE)
Invalid for linear type
Bit 9: POSMAX Turn Preset Complete (TPRSE)
Invalid for linear type
Bit A: ABS Encoder Rotating Direction
Bits B to F: Reserved for system use
-
-
-
IW
0D -
Reserved for system use
-
-
-
-
Register
No.
Name
Description
Normal
O
perat
ion
Mo
de
Si
mulat
ion Mod
e
G
enera
l-pu
rpose I/
O Mod
e
Refer-
ence
Page