4 servopack parameter settings, 1 sgda servopack parameter settings – Yaskawa JAPMC-MC2300 User Manual
Page 55
3.4 SERVOPACK Parameter Settings
3.4.1 SGDA SERVOPACK Parameter Settings
3-10
3.4 SERVOPACK Parameter Settings
The SERVOPACK parameters must be set as described in this section when using a SERVOPACK in combination with
an SVA-01 Module.
3.4.1 SGDA SERVOPACK Parameter Settings
Set the parameters as shown below.
* Both CN-01, bit B and Cn-02, bit F cannot be turned ON. If they are both turned ON, Cn-01, bit F takes priority. If Cn-01, bit F
is set to 1, the value of OL
14 (Positive Side Limiting Torque/Thrust Setting at the Speed Reference) will be treated as the
torque feed forward.
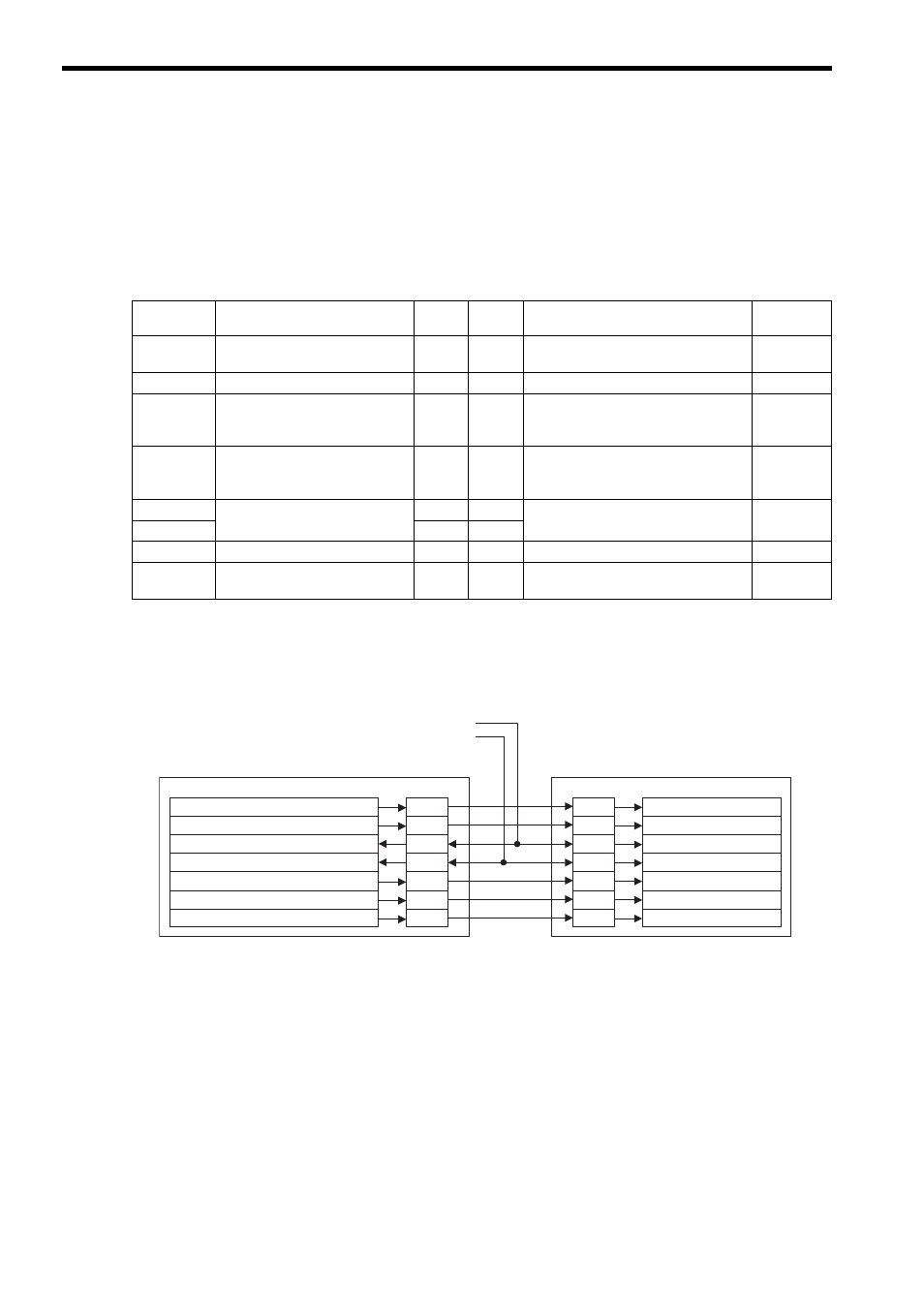
The I/O signals related to the SVA-01 are shown in the following connection diagram.
Parameter
No.
Name
Default
Value
Set
Value
Setting Contents
Remarks
Cn-01, bit 0
Servo ON input (/S-ON) enable/
disable
0
0
Enables the Servo ON input (/S-ON).
Cn-01, bit 1
SEN signal input enable/disable
0
0
Enables the SEN signal input (SEN).
Cn-01, bit 2
Forward rotation prohibited in-
put (P-OT) enable/disable
0
0
Enables the forward rotation prohibited
input (P-OT).
This input
can also be
disabled.
Cn-01, bit 3
Reverse rotation prohibited in-
put (N-OT) enable/disable
0
0
Enables the reverse rotation prohibited
input (N-OT).
This input
can also be
disabled.
Cn-01, bit A
Control mode selection
0
1
Torque control II
(Torque Control
↔ Speed Control)
Cn-01, bit B
0
1
Cn-01, bit F
Torque feed forward function
0
0
Disables the torque forward function.
*
Cn-02, bit F
Torque reference input selection
0
1
In speed control mode, TREF is used as
the torque limit.
*
CN1/CN2
General-purpose input N-OT/
General-purpose input P-OT/
SGDA SERVOPACK
CN1
SVA-01 Module
Setting/Monitoring Parameters
Input Signals
/S-ON
OW
00, bit 0: Servo ON
31
14
Internal variable: Switches control mode
/P-CON
12
15
IW
58, bit 4: General-purpose DI_4
33
N-OT
17
OW
00, bit 15: Alarm clear
/ALM RST
30
18
IW
58, bit 3: General-purpose DI_3
15
P-OT
16
OW
5D, bit 3: General-purpose DO_3
14
12
/N-CL
OW
5D, bit 4: General-purpose DO_4
13
11
/P-CL