Yaskawa JAPMC-MC2300 User Manual
Page 106
5.4 MP2000 Series Machine Controller Parameter Details
5.4.2 Motion Setting Parameter Details
5-34
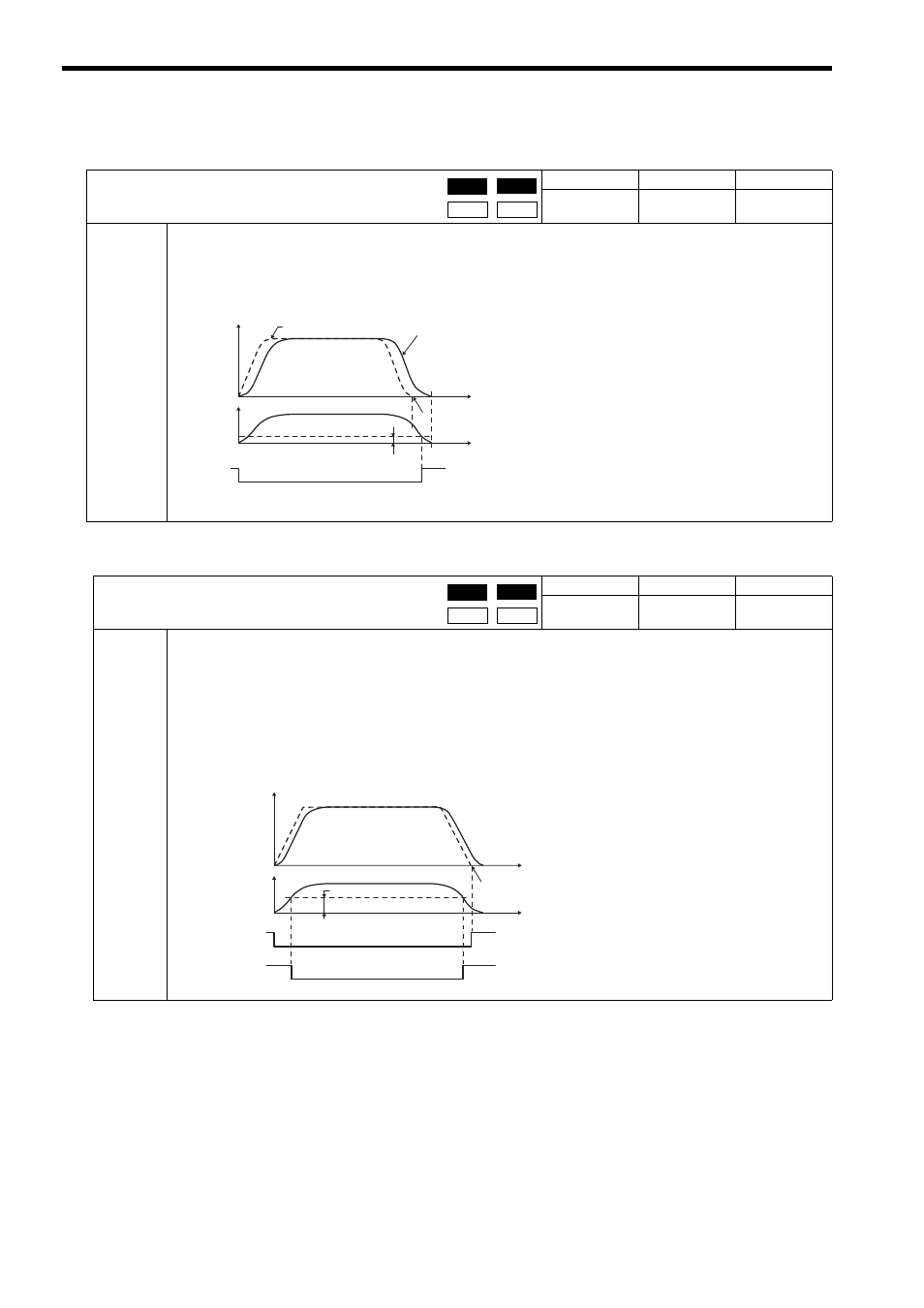
( 16 ) Positioning Completed Width
( 17 ) NEAR Signal Output Width
OL
1E
Width of Positioning Completed
Setting Range
Setting Unit
Default Value
0 to 65535
Reference unit
100
Description
The Positioning Completed signal (IW
0C, bit 1) turns ON when the absolute value of the difference between
the reference position and the feedback position is less than the value set here after completion of position refer-
ence distribution during position control.
Set values that are appropriate for all machines in the system. If the value is too small, a long time will be required for
positioning to complete.
OL
20
NEAR Signal Output Width
Setting Range
Setting Unit
Default Value
0 to 65535
Reference unit
0
Description
NEAR Position (IW
0C, bit 3) turns ON when the absolute value of the difference between the command posi-
tion and the feedback position is less than the value set here.
If the NEAR Signal Output Width is set to 0, the NEAR Position bit (monitoring parameter IW
0C, bit 3) will be
turned ON when reference pulses have been distributed. (monitoring parameter IW
0C, bit 0).
If the NEAR Signal Output Width is set to a value other than 0, this bit will be turned ON when the result of subtracting
the Machine Coordinate System Feedback Position (monitoring parameter IL
16) from the Machine Coordinate Sys-
tem Reference Position (monitoring parameter IL
12) is less than the NEAR Signal Output Width, even if the refer-
ence pulses have not been distributed.
This parameter has no relation to the SERVOPACK parameter Position Proximity (NEAR) Signal Width.
Position
Phase
Speed Torque
Speed
Position Error
Reference
Motor speed
Distribution
Completed
(IL
1A)
Positioning
Completed
signal
(IW
0C, bit 1)
Width of Positioning Completed
(OL
1E)
Time
Time
Related Parameters
Fixed Parameter 4: Reference Unit Selection
Fixed Parameter 5: Number of Digits Below Decimal
Point
Fixed Parameter 6: Travel Distance per Motor Revolution
Fixed Parameter 8: Servo Motor Gear Ratio
Fixed Parameter 9: Machine Gear Ratio
OW
2E: Position Loop Gain
IW
0C, bit 0: Discharging Completed (DEN)
IW
0C, bit 1: Positioning Completed (POSCOMP)
Position
Phase
Speed Torque
Position Error
NEAR Signal Output
Width
Distribution
completed
NEAR Signal
Output Width = 0
NEAR Signal
Output Width
≠ 0
Related Parameter
IW
0C, bit 3: NEAR Position