3 motion subcommands, 1 no command (nop), 1 ) related parameters – Yaskawa JAPMC-MC2300 User Manual
Page 225
7.3 Motion Subcommands
7.3.1 No Command (NOP)
7-85
7
Motion Commands
7.3 Motion Subcommands
With the SVA-01 Module, two motion subcommands can be used: NOP and FIXPRM_RD.
The following provides a detailed description of these two subcommands.
7.3.1 No Command (NOP)
Set this command when a subcommand is not being specified.
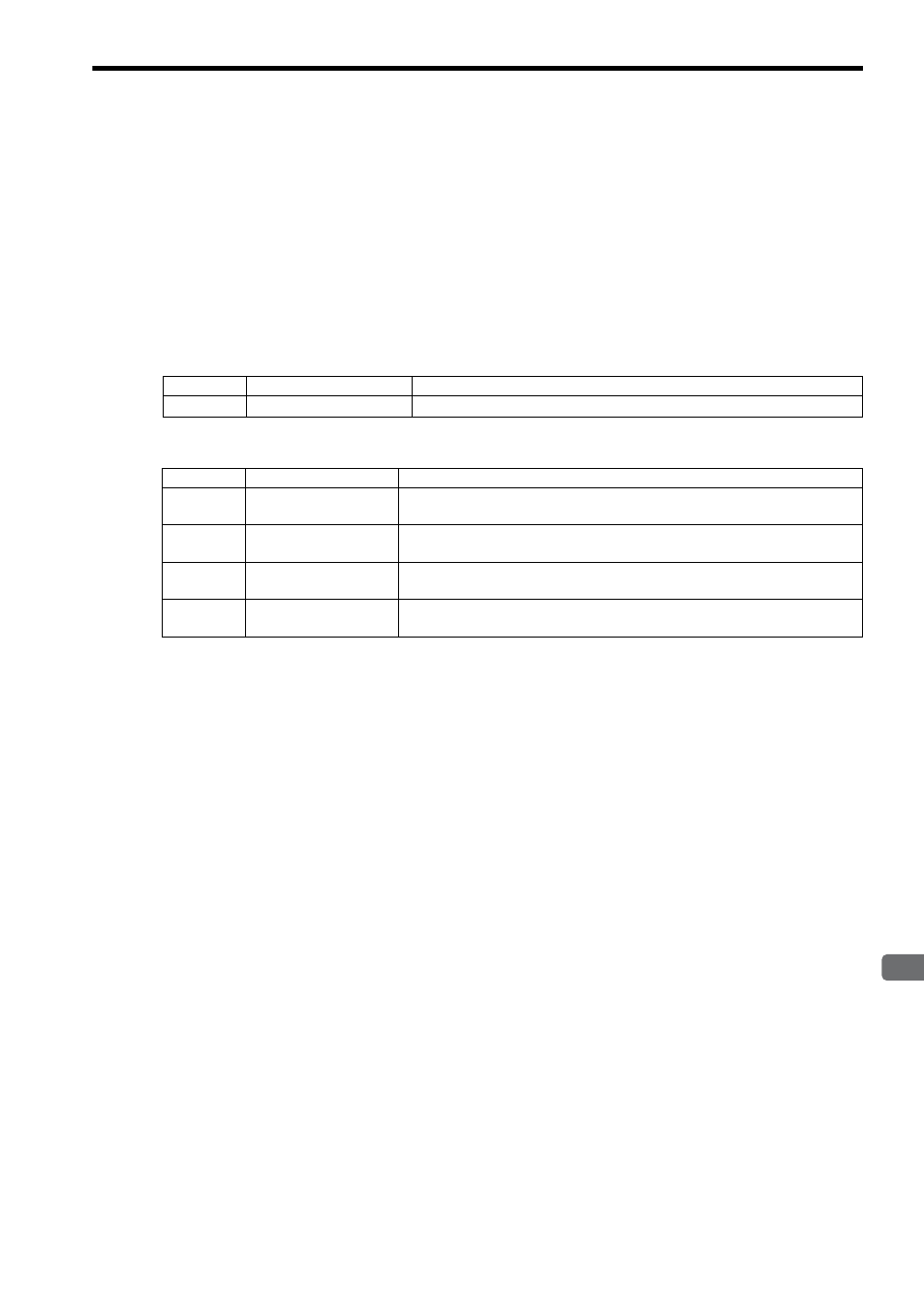
( 1 ) Related Parameters
[ a ] Setting Parameters
[ b ] Monitoring Parameters
* The NOP command’s subcommand status stored in Command Execution Completed (COMPLETE) is not defined.
Parameter
Name
Setting Contents
OW
0A
Motion Subcommand
Set to 0 to specify no command (NOP).
Parameter
Name
Monitoring Contents
IW
0A
Motion Subcommand
Response Code
Indicates the motion subcommand that is being executed.
The response code is 0 during NOP command execution.
IW
0B
Bit 0
Command Execution
Flag
Turns ON during NOP command execution.
Turns OFF when execution has been completed.
IW
0B
Bit 3
Command Error
Completed Status
Turns ON if an error occurs during NOP command execution.
Turns OFF when another command is executed.
IW
0B
Bit 8
Command Execution
Completed *
Turns ON when NOP command execution has been completed.