Yaskawa JAPMC-MC2300 User Manual
Page 113
5.4 MP2000 Series Machine Controller Parameter Details
5.4.2 Motion Setting Parameter Details
5-41
5
Motion Parameters
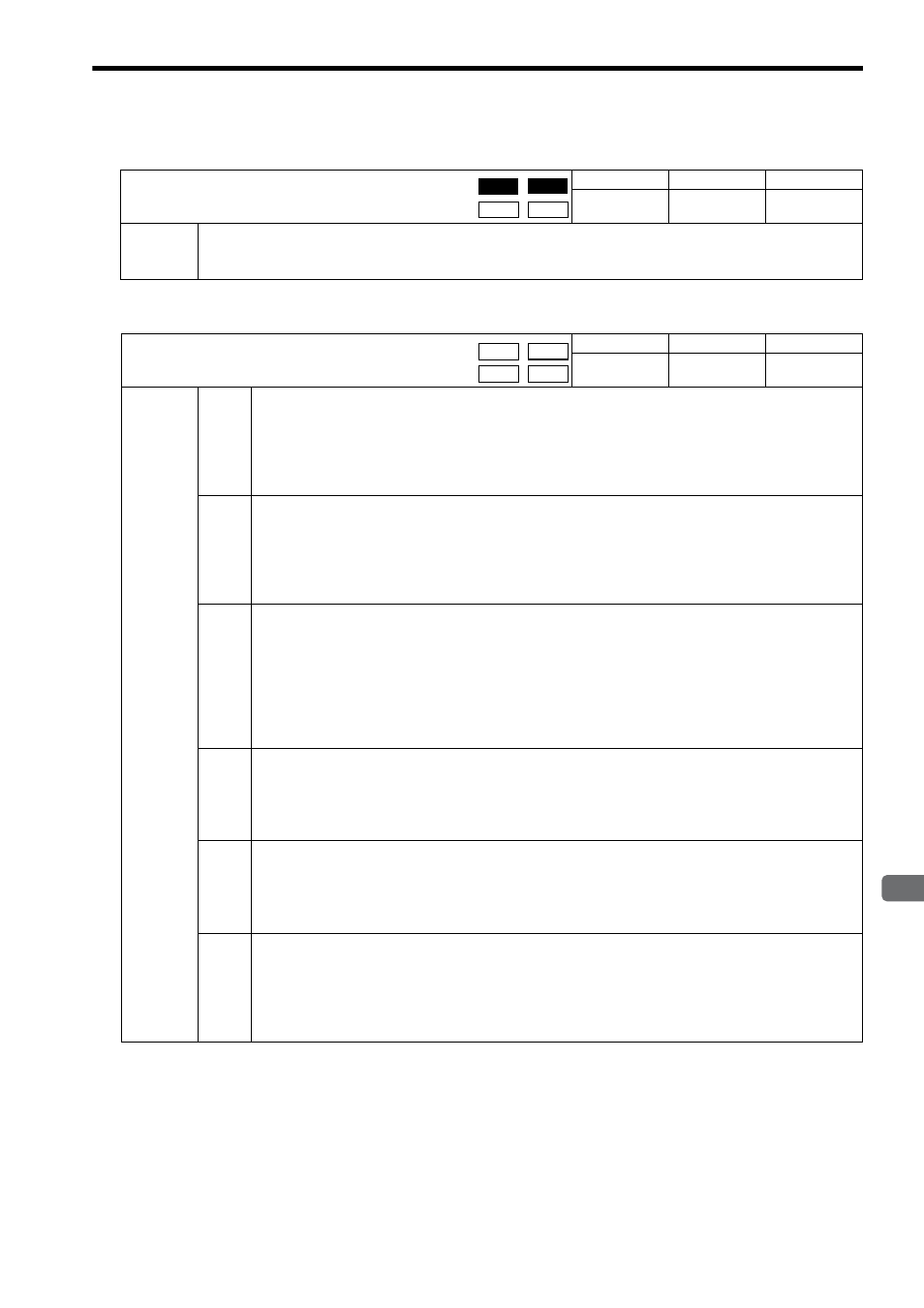
( 30 ) Supplemental Setting
( 31 ) General-purpose DO
OW
5C
Fixed Parameter Number
Setting Range
Setting Unit
Default Value
0 to 65535
−
0
Description
Set the fixed parameter number to be read out by executing the motion subcommand FIXPRM_RD.
The result of reading operation will be stored in the monitoring parameter Fixed Parameter Monitor (IW
56.)
Refer to 7.3 Motion Subcommands on page 7-85 for details.
OW
5D
General-purpose DO
Setting Range
Setting Unit
Default Value
−
−
0000H
Description
Bit 0
General-purpose DO_0
Set the general-purpose DO-0 to OFF or ON.
0: OFF (default)
1: ON
This bit can be used only in the general-purpose I/O mode. In the normal operation mode, it is used by the sys-
tem.
Bit 1
General-purpose DO_1
Set the general-purpose DO-1 to OFF or ON.
0: OFF (default)
1: ON
This bit can be used only in the general-purpose I/O mode. In the normal operation mode, it is used by the sys-
tem.
Bit 2
General-purpose DO_2
Set the general-purpose DO-2 to OFF or ON.
0: OFF (default)
1: ON
This bit can be used both in the normal operation mode and the general-purpose I/O mode.
For use in normal operation mode, this bit must be set to 1 (Use as a general-purpose signal) in General-Purpose
DO_2 Signal Selection bit (fixed parameter No.21, bit 5).
Refer to 11.4.4 General-purpose DO_2 Signal Selection on page 11-17 for details.
Bit 3
General-purpose DO_3
Set the general-purpose DO-3 to OFF or ON.
0: OFF (default)
1: ON
This bit can be used in the general-purpose I/O mode and in the normal operation mode.
Bit 4
General-purpose DO_4
Set the general-purpose DO-4 to OFF or ON.
0: OFF (default)
1: ON
This bit can be used in the general-purpose I/O mode and in the normal operation mode.
Bit 5
General-purpose DO_5
Set the general-purpose DO-5 to OFF or ON.
0: OFF (default)
1: ON
This bit can be used only in the general-purpose I/O mode. In the normal operation mode, it is used by the sys-
tem.
Position
Phase
Speed Torque
Position
Phase
Speed Torque