Yaskawa JAPMC-MC2300 User Manual
Page 174
7.2 Motion Command Details
7.2.3 Zero Point Return (ZRET)
7-34
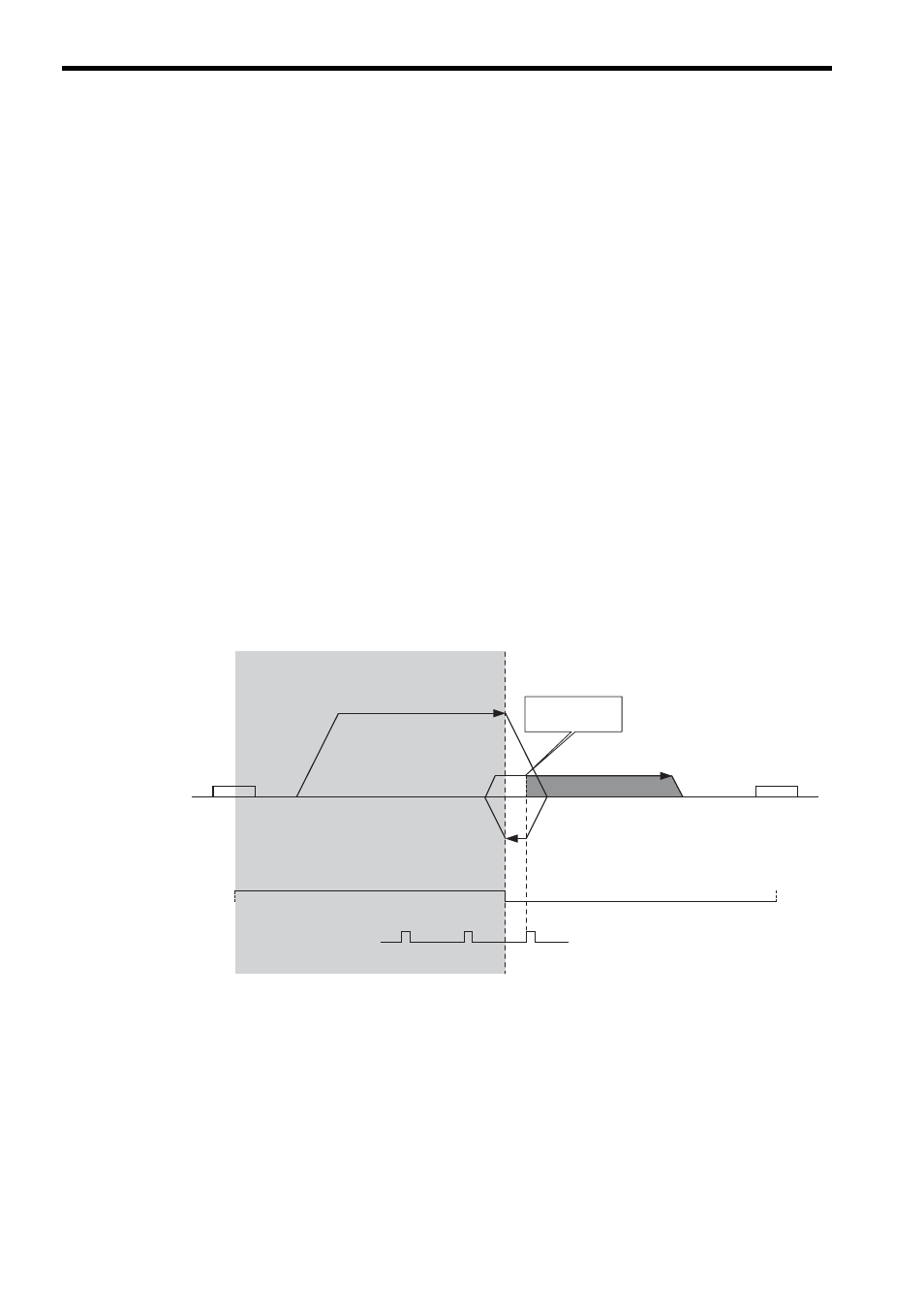
[ g ] DEC2 + Phase-C Signal Method (OW
3C = 6)
With this method, the machine's position is confirmed by the ON/OFF status of the DEC2 signal and the retracting
operation is performed automatically, so the zero point return is always performed with the same conditions.
Starting the Zero Point Return in the High Region
1.
Travel is started in the positive direction at the speed specified by the Speed Reference Setting (setting
parameter OL
10).
2.
When the falling edge of the DEC2 signal is detected, the axis decelerates to a stop.
3.
After decelerating to a stop, the axis travels in the reverse direction at the Approach Speed (setting
parameter OL
3E).
4.
When the rising edge of the DEC2 signal is detected, the axis decelerates to a stop.
5.
After decelerating to a stop, the axis travels in the forward direction at the Creep Rate (setting parame-
ter OL
40).
6.
After the falling edge of the DEC2 signal is detected, the position is latched when the rising edge of the
first phase-C pulse is detected.
7.
The axis moves from the latched position by the distance set in the Zero Point Return Travel Distance
(setting parameter OL
42) and stops. The machine coordinate system is established with this final
position as the zero point.
If an OT signal is detected during the zero point return operation, an OT alarm will occur.
Start
Zero Point Return Travel Distance
DEC2
(DI_5 or OW
05, bit 8)
N-OT
(DI_4)
P-OT
(DI_3)
Approach Speed (OL
3E)
High region
Low region
End
Phase-C signal
Speed Reference Setting
(OL
10)
Phase-C signal
latch at this point
Creep Rate
(OL
40)