2 ) signals used for zero point return – Yaskawa JAPMC-MC2300 User Manual
Page 156
7.2 Motion Command Details
7.2.3 Zero Point Return (ZRET)
7-16
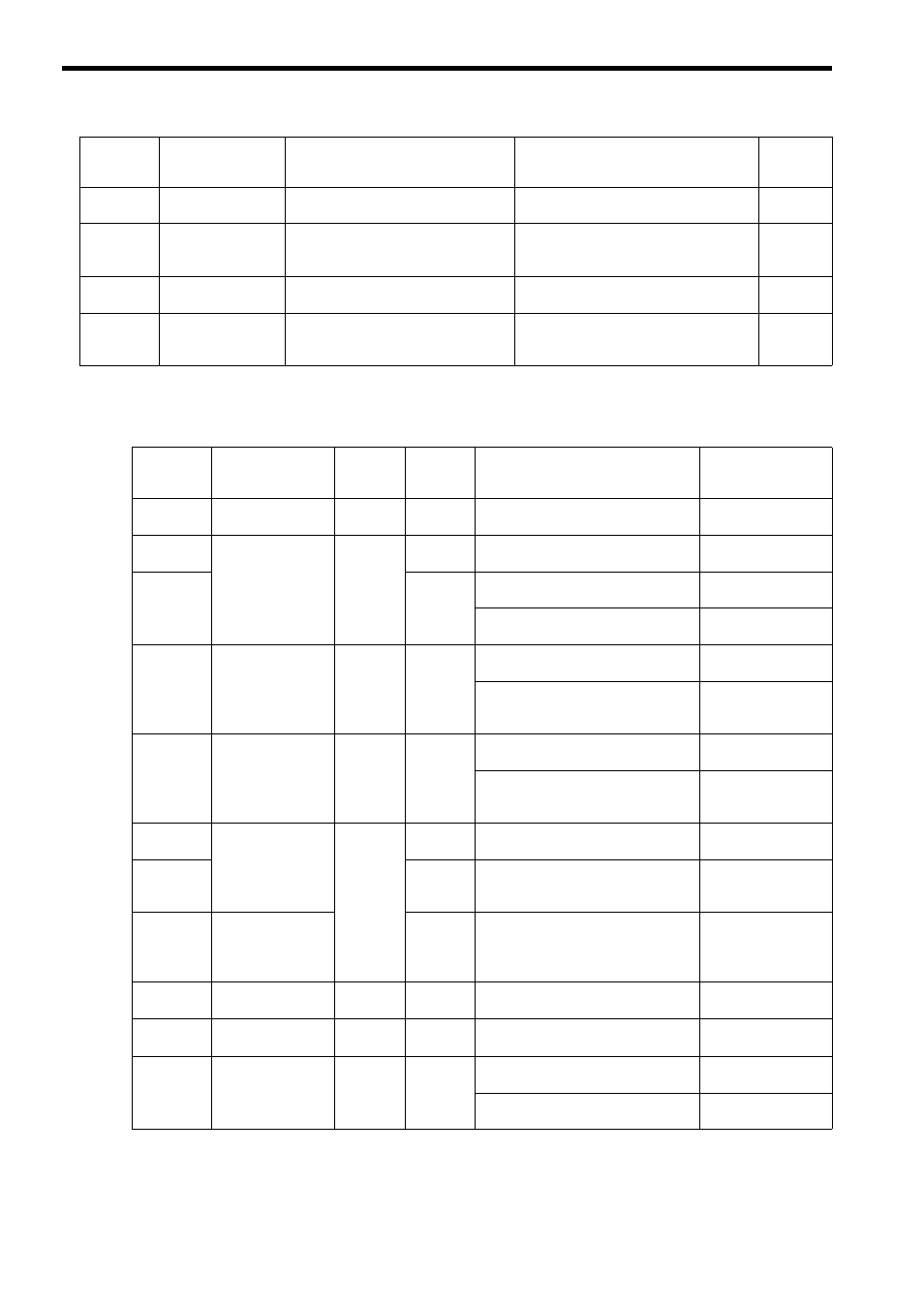
( 2 ) Signals Used for Zero Point Return
The following table shows the details on the signals used for zero point return operation.
* 1. The polarity can be inversed by setting the fixed parameter No. 20, bit 1 (C Pulse Input Signal Polar-
ity Selection).
* 2. The polarity can be inversed by setting the fixed parameter No. 1, bit 5 (Deceleration LS Inversion Selection).
16
N-OT & C pulse
Uses the negative overtravel signal and
phase-C pulse.
N-OT: DI_4
7-51
17
N-OT Only
Uses only the negative overtravel signal.
N-OT: DI_4
This method must not be used if repeat
accuracy is required.
7-52
18
INPUT & C pulse
Uses the INPUT signal and phase-C
pulse.
INPUT: OW
05, bit B
7-53
19
INPUT Only
Uses only the INPUT signal.
INPUT: OW
05, bit B.
This method must not be used if repeat
accuracy is required.
7-55
Setting
Parameter
OW
3C
Name
Method
Signal Meaning
Reference
Page
Signal
Name
Signal Allocation
Polarity
Inversion
Function
Latch
Function
Description
Zero Point Return
Methods (OW
3C)
That Use the Signal
Phase-C
5 - 6 pin (Differen-
tial input)
Valid
*1
Valid
Used as the zero point signal for zero
point return
0, 3, 6, 7, 11, 12, 14,
16, and 18
ZERO
General-purpose
DI_2 (pin No. 18)
Valid
*2
Valid
Used as the zero point signal for zero
point return
1, 2, 4, and 5
HOME LS
Valid
Used as the deceleration limit switch
(LS) signal for zero point return
14
Used as the zero point signal for zero
point return
15
P-OT
General-purpose
DI_3 (pin No. 14)
Invalid
Invalid
Used as the deceleration limit switch
(LS) signal for zero point return.
12
Used as the deceleration limit switch
(LS) signal and the zero point signal for
zero point return.
13
N-OT
General-purpose
DI_4 (pin No. 13)
Invalid
Invalid
Used as the deceleration limit switch
(LS) signal for zero point return.
16
Used as the deceleration limit switch
(LS) signal and the zero point signal for
zero point return.
17
DEC1
General-purpose
DI_5 (pin No. 36) or
OW
05, bit 8
Valid
*2
Invalid
Used as the deceleration limit switch
(LS) signal for zero point return.
0, 2, 5, and 7
DEC2
Invalid
Used as the zone signal and the deceler-
ation limit switch (LS) signal for zero
point return.
4 and 6
EXT
General-purpose
DI_5 (pin No. 36)
Valid
Used as the external input signal for the
external positioning command. Also
used as the input signal for the modal
latch function.
−
Reverse
LMT
OW
05, bit 9
Invalid
Invalid
Used as the zone signal for zero point
return.
5 and 7
Forward
LMT
OW
05, bit 10
Invalid
Invalid
Used as the zone signal for zero point
return.
5 and 7
INPUT
OW
05, bit 11
Invalid
Invalid
Used as the deceleration limit switch
(LS) signal for zero point return.
18
Used as the zero point signal for zero
point return.
19