Rockwell Automation 8510 AC Spindle Drive System User Manual User Manual
Page 64
Interface Signal Descriptions
Chapter 7
7-60
When a digital speed command or a unipolar 0-10V DC analog speed
command is used, these two inputs will reverse the direction of motor
rotation.
When this input is turned Off, the motor will be regeneratively braked to
zero speed. Whether or not zero speed holding torque will be available will
depend on the setting of the programmable parameter Enable Torque.
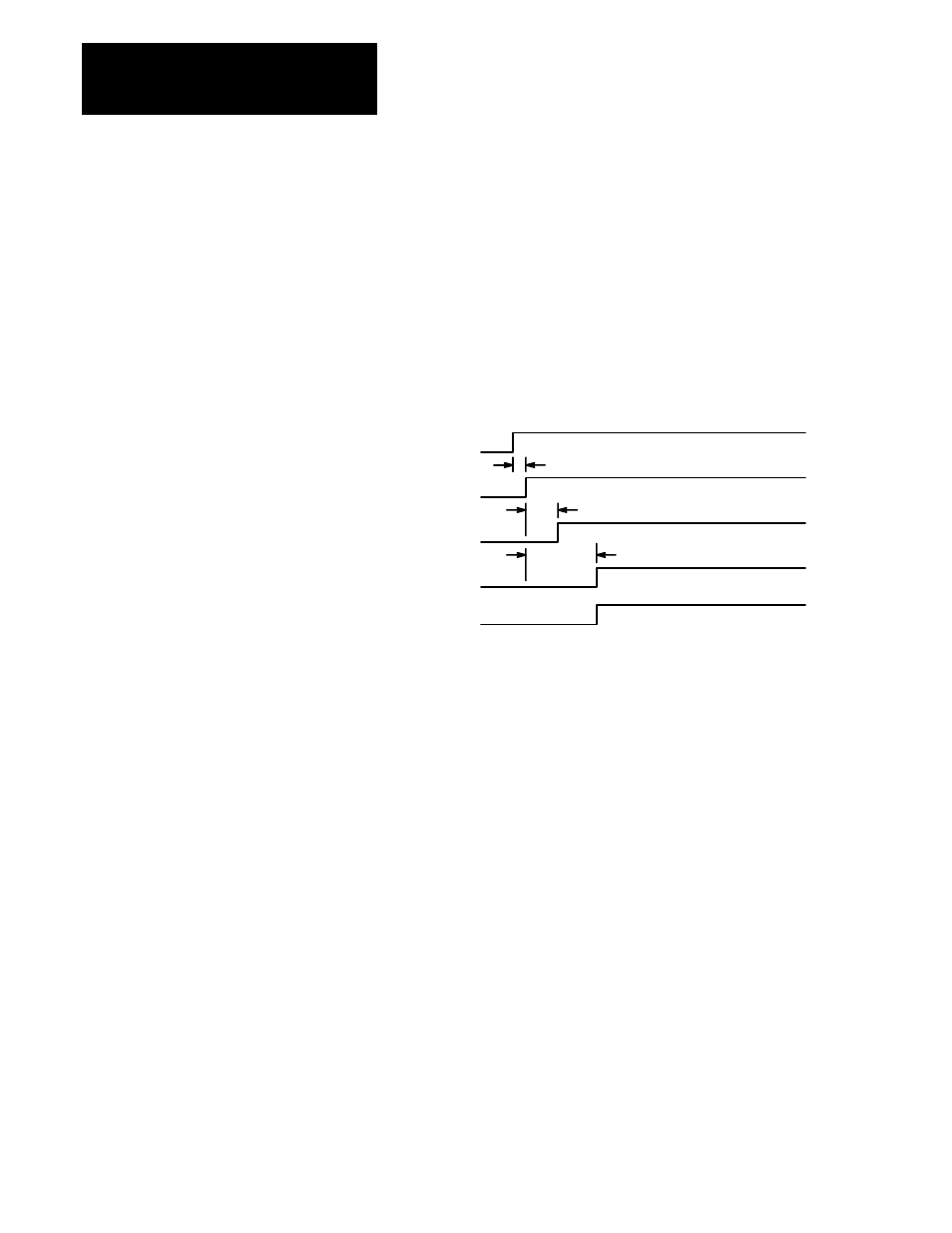
Figure 7.2 shows the relative timing required for the Coast to Stop, Drive
Enable and Forward (or Reverse) Run inputs to assure proper drive
operation.
Figure 7.2
Timing
About 6 seconds
Not Running
Running (if either Run command is On)
Must be greater than or equal to 0 ms
Coast to Stop Input
Drive Enable Input
Forward Run Input
Drive Ready Output
Motor Operation
Must be greater than or equal to 0 ms
Low Torque Limit Select – CN9-7
When this input is On, the maximum allowable motor torque output is
restricted to the value programmed with the Low Torq Lmt parameter.
When this input is Off, the motor torque is allowed to go to the maximum
rating for that specific motor/drive combination.
Accel/Decel Rate Select (Torque Mode Enable) – CN9-9
During normal spindle mode operation, this input is used to select different
motor accel/decel ramp rates. When this input is Off, the motor accel/decel
rate is determined by the value programmed with the Acc Rate #1
parameter. When this input is On, the motor accel/decel rate is determined
by the value programmed with the Acc Rate #2 parameter.
In servo mode operation, there is no ramp control supplied to the analog
input signal. The drive will immediately respond to any input signal with
output torque up to the maximum capability of the motor/drive system (or
to the Low Torq Lmt level, if selected).
In torque mode operation this input will have a different function. If the
TORQUE MODE – Torque Enable parameter has been set to “Enable”
during the drive setup programming, this input is used to switch the drive
between velocity control operation and torque control operation. When this
input is Off, the drive runs as a normal velocity controlled drive with the
speed command either digital or from Analog Input #1. When this input is
On, the drive operates as an open loop torque controlled drive with the
torque command from Analog Input #2.